
Arduinoベースの車では、簡単に軌跡を外れるので、Micro:bit carにセンサを外付けしてあたりを付けてみた。Arduino(VScodeのPlatformIO)ではmicro:bit(makecode)に比較して開発のループ時間が長くなるので。

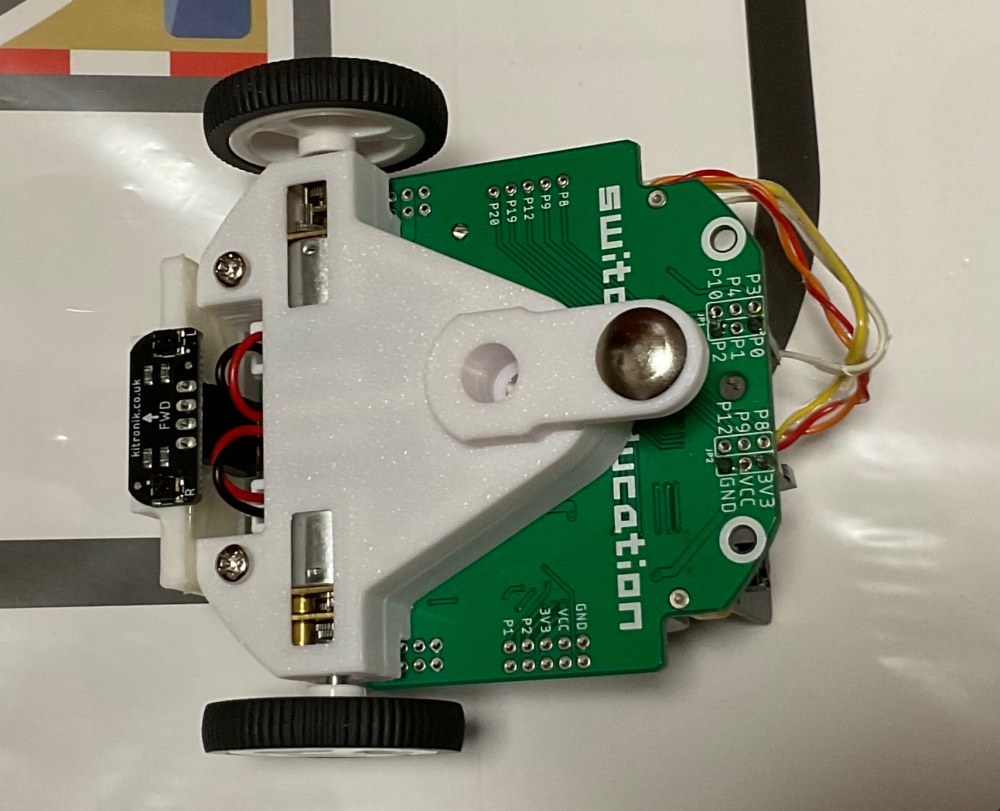
3Dプリンタでアタッチメントを作成して、センサーを両面テープで貼り付けました。アナログ入力はP0とP2を使っています。
動きを遅くするために、モーターの動作時間を限定してフィードバックが確実にかかるようにしてやると『カメモード』ですがトレースできるようになりましたが、動かすにはパラメータが多いので調整は大変そうです。ましてP.I.D制御までやろうとすると。
makecodeのコードは以下に、
https://github.com/chateight/trace_microbit
2023/5/18 LED表示に時間が掛かっている
LED表示にステータス、前進/右旋回/左旋回の数字を表示させるだけで数十ms必要で制御が間に合わなくてコースアウトしていたので、LED表示を削除して『ネズミモード』ぐらいまで高速化、展開時のモーター駆動にはP制御も追加しました。P制御の原理はフォトトランジスタの読み取り差をモーター駆動力にリニアに反映(下限と上限は決めていますが)しています。
admin