
ライントレースはロボット構成の基本要素なので、一度はやってみます。
一年半前に作った自走車(超音波センサーで障害物回避)にライントレース機能を付加するのが便利そうなのでそれでやります。
センサーは、
https://resources.kitronik.co.uk/pdf/56111-kitronik-move-line-following-board-datasheet.pdf
ですが、フォトダイオードと光センサートランジスターを組み合わせた出来合いのモジュールを使います。電源電圧3V時に黒で3V、白で0Vが出力されます。
取り付け位置は中央ネジで3Dプリンタで造形したアタッチメント経由で取り付けの予定。

ラインマットとセンサーの距離が重要だろうから、事前にM5Stack使って距離を決めてやります。
<黒>

<白>
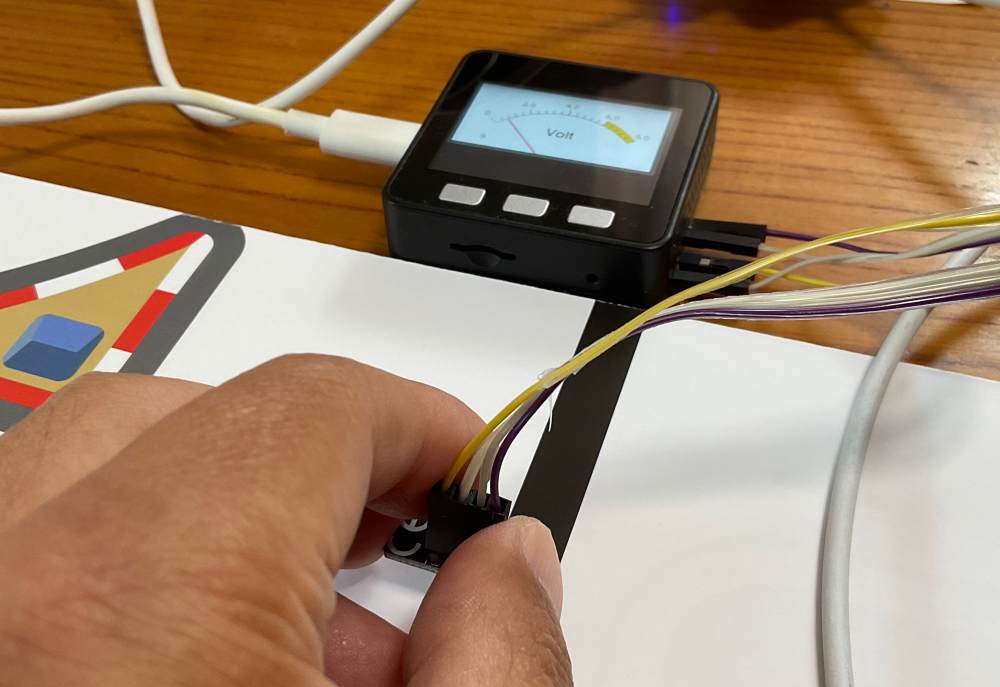
もちろん白黒で理想的に0Vや3Vにはならないから、ダイナミックレンジが取れそうなところで距離を設定します。どちらにしても近すぎても(シートに接触するぐらいに知るとかえってダイナミックレンジは悪化)遠すぎても(もちろん反射光を拾うのが動作原理なので論外)いけません。
で、概ね5mmあたりが適切のようです。
P.S. 2023/5/11
ArduinoのADCで読み込むと黒と白の値が反転してます。なぜだろう?
admin