夏に近づいたせいか、車内の温度は相当上昇するようで、土曜日にデモのため持ち出したホーバークラフト、今日取り出してみるとファンのホルダーがグダグダに変形しています。
PLAの耐熱温度は60℃ぐらいらしいから、車内だと今でも直射日光浴びる場所だとアウトの模様。この先意識しておかないと、
ABSだと耐熱性は問題なくとも、形状安定性特にファンのホルダーのようなそこそこ寸法精度が必要とされる場所には向いていないと思う。

admin

la vie libre
夏に近づいたせいか、車内の温度は相当上昇するようで、土曜日にデモのため持ち出したホーバークラフト、今日取り出してみるとファンのホルダーがグダグダに変形しています。
PLAの耐熱温度は60℃ぐらいらしいから、車内だと今でも直射日光浴びる場所だとアウトの模様。この先意識しておかないと、
ABSだと耐熱性は問題なくとも、形状安定性特にファンのホルダーのようなそこそこ寸法精度が必要とされる場所には向いていないと思う。
admin
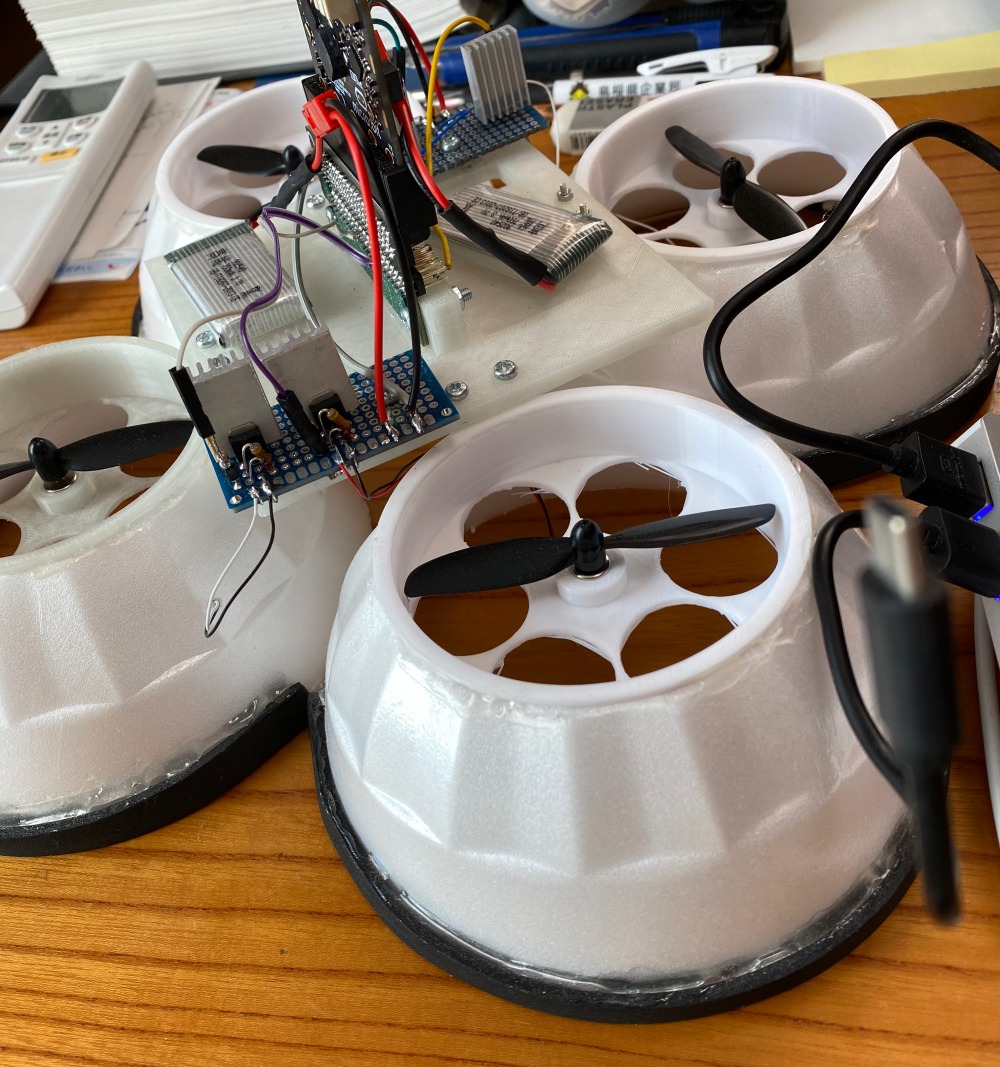
ようやくver.2を製作した、
改良点は、
① プロペラを水平(可変はできる)取り付けで横方向の推力が出ないようにした
② プロペラの風の抜けをよくできるような取り付け形状に改良
③ micro:bitを水平に取り付けてコンパス機能を使えるようにした
④ 金属ネジとか使わないで、かつコネクタも軽量化して、全体で二割ぐらいは軽量化
ver.1のようにファンが傾いていないから、割と安定してホバリングしている。
プロペラ駆動力(回転数)の調整でどこまで移動や回転が制御できるかはこれから、
<micro:bit制御用のコード>
・本体用
https://github.com/chateight/hober
ここでファンに与える電圧(回転数)を変えれば動きが制御できるはず
・コントローラー用
https://github.com/chateight/hober_ctl
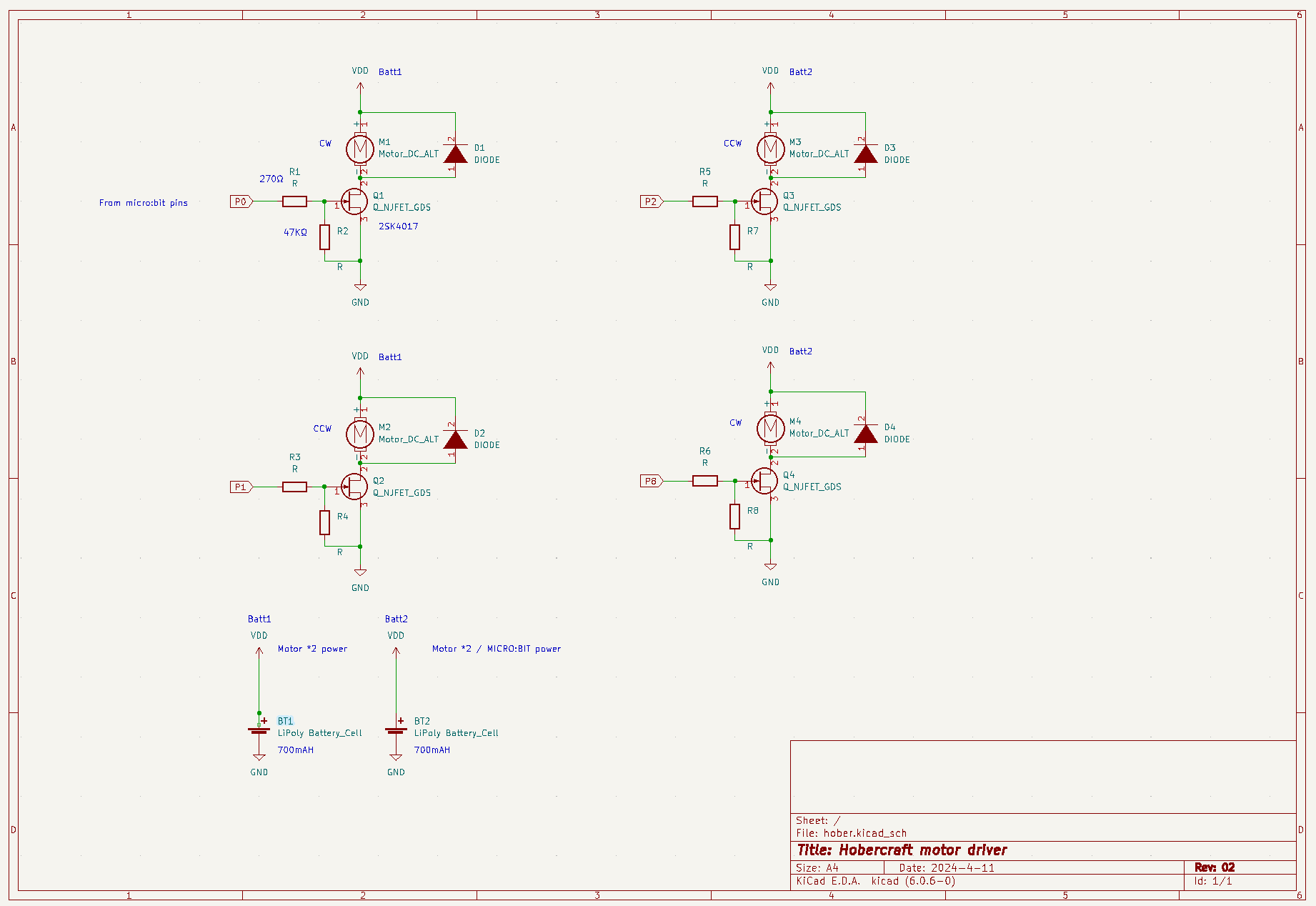
<モーター駆動回路図>
admin
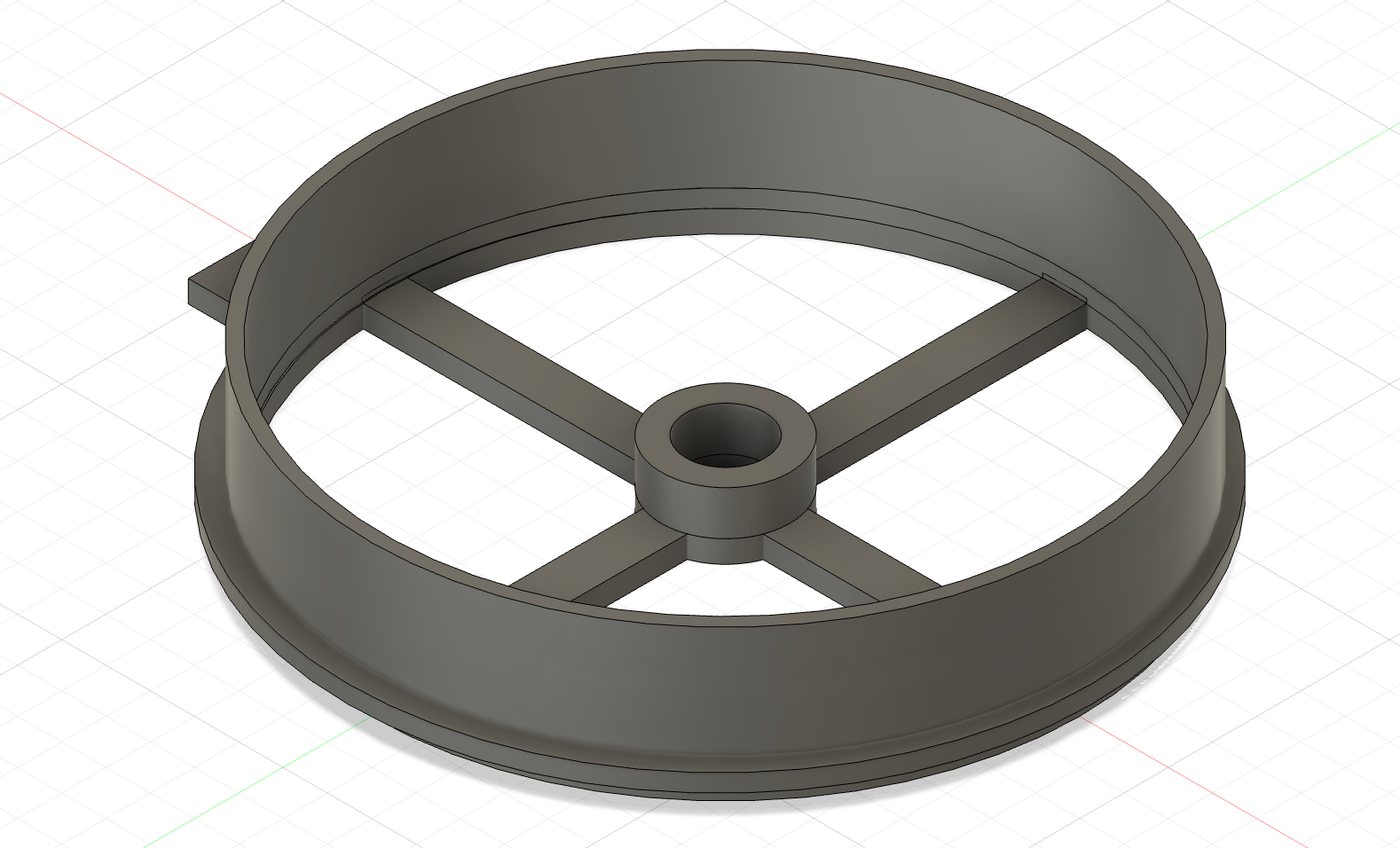
第一目標は、構造のアンバランスによる回転力を極力抑えてccw/cwプロペラの回転差で回転をコントロールできるようにすること。そのためには取り付けを正確にしないといけないからプロペラ部分を独立造形で微調整も可能にしたつもり。
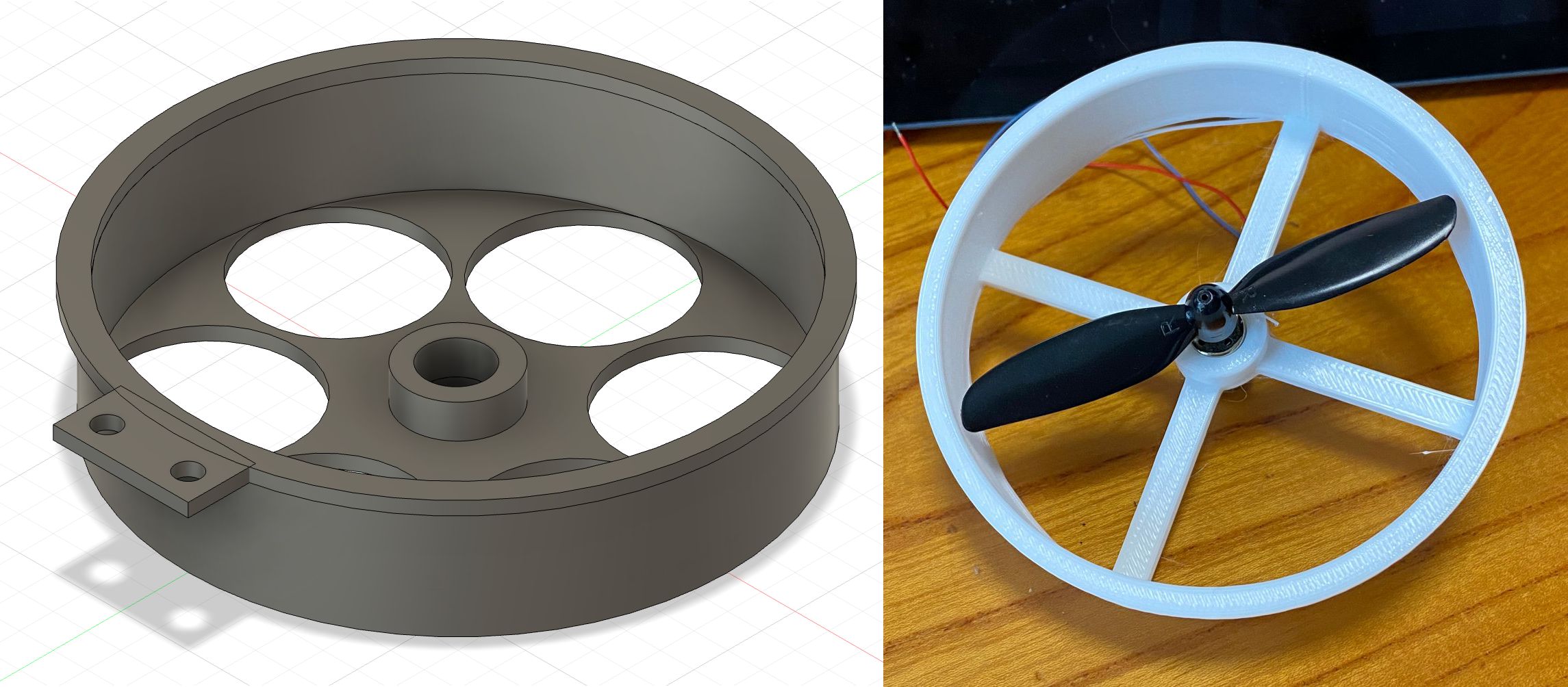
あと一点は空気の抜けを良くするために、障害物となるリブをコンパクト化して写真の左(Ver1)、右(Ver2)のようにしてみた。
プロペラの回転数差で回転を制御できれば、micro:bitのコンパス情報を使って回転方向のドリフトを抑えることが可能になるだろう。
そのためにはmicro:bitを水平実装しないといけないからベース部も作り直し。
2024/3/22 追加
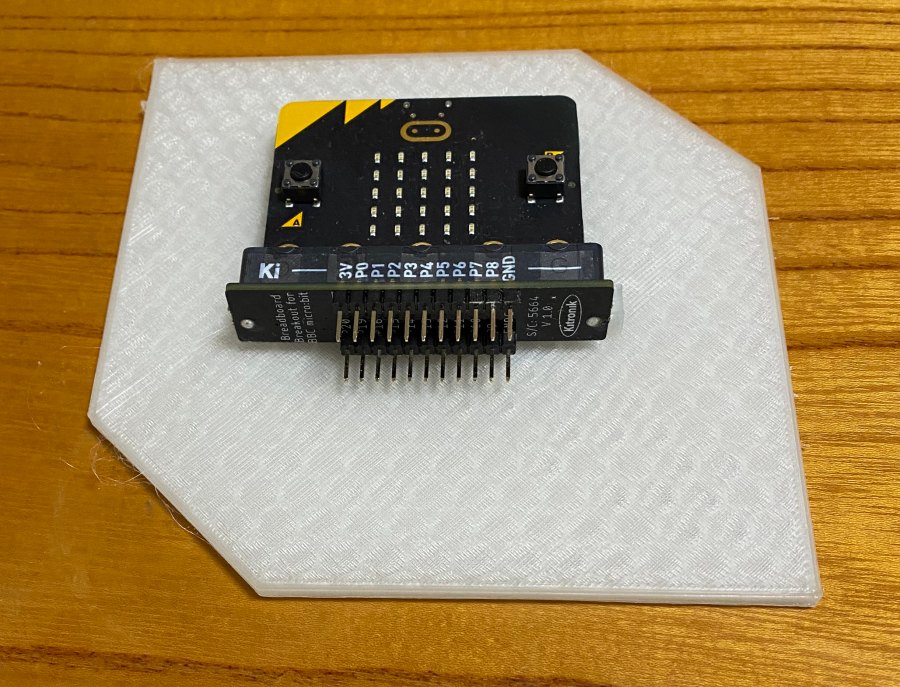
こんな感じで重量バランスは考慮してmicro:bitを配置して、レギュレータは軽量化のため両面テープで貼り付け。Ver1が300グラム超過だったものが合計で数十グラムは軽量化になると予測。
admin
発泡丼では空気室の面積が不足で、浮上力が思ったように出ないから、電池電圧が低下すると浮き上がらない。
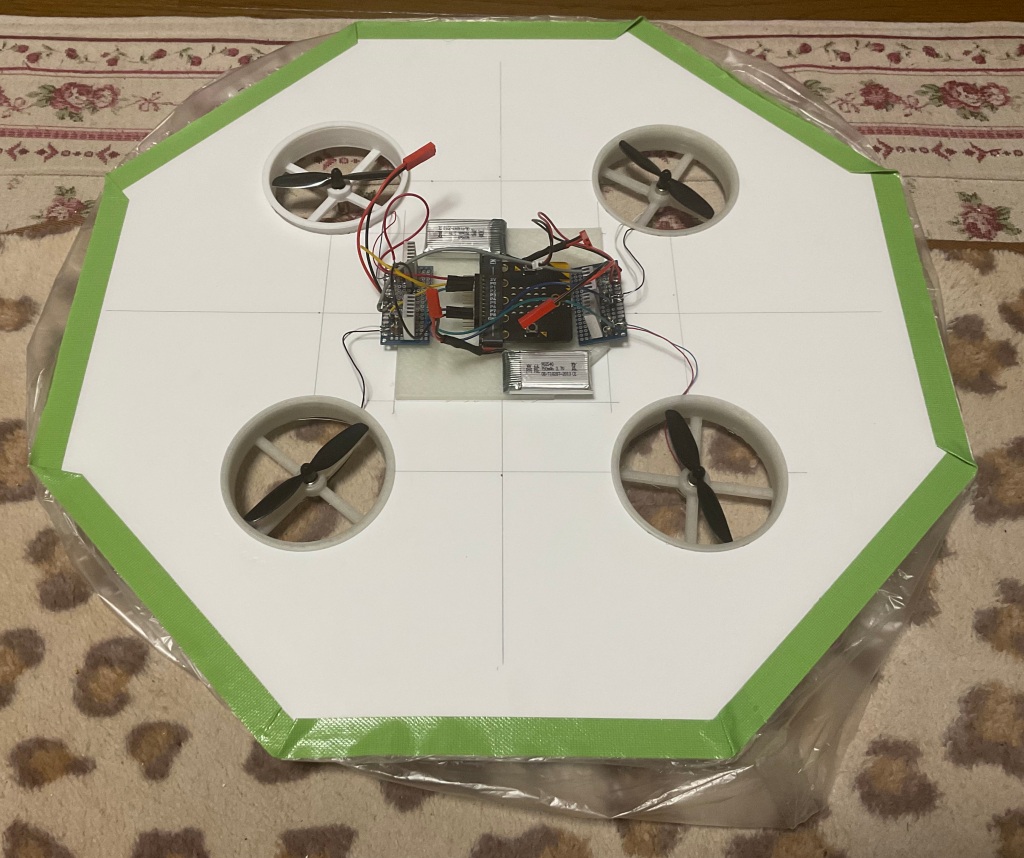
対策は設置面積を増やすことですが、あまり大きすぎると重量制約も出てくるだろうから、ホームセンターで発泡板を上質紙で挟んだ軽量のボードを買ってきて組み込み。

組み上げるとこんな感じ、

スカート用の素材に使えそうなもの(テープ付き養生シート)があったので、それを貼り付けます。ただしスカートが開かないように左右を紐で抑えるため両面テープで貼り付け。x/y方向でそれぞれ3本づつ使いました。

動かしてみているところ、
回転モーメントが発生しているようで、自然にUFOのごとく自転しています。おそらくモーターの回転数がアンバランスではないかと思われますが。
ようやくスタートポイントといったところですね、
P.S. 2024/2/2
回転の原因はモーターの回転数変えてみて、回転数が支配的ではなくて、傾いて取り付けられていることによる横方向の力がおそらく原因。したがって取り付け角度のコントロールが必要ですが、構造作り替え必要です。横方向の力が働くので、回転すると同時に移動も発生していると思われます。
admin
ちょっと触ってみた感触ですが、
① 電池電圧が満充電状態ではおよそ4.1V程度あってモーターの風量も多いけれども、3.9Vぐらいになると明らかに浮力が落ちる
② 本体の重量測ると207g程度で電池が二個で35g、合計でおよそ240gだから、Telloのほぼ3倍の重量だから結構重い
③ ファンの空気の抜けがイマイチの感
ファンとモーターの取り付けのV2設計図ですが、ドローンも概ねこんな感じだから作り替えが必要と思う。
④ 9軸センサーなしではやはり姿勢制御は辛い、micro:bitで使えそうなのは回転をコントロールできる方角センサーだけだろうから
垂直方向がないだけで、実質はほぼドローンと類似の制御が必要ということだろうから、V2の設計を始めてみるか。
admin
ドローン用のLi-ion電池はパワーがあるので、電池一個でモーター2個駆動は余裕がありそうです。(まだ電池は固定していない)電池の公称容量は750mAhなので実働15分ぐらいは動きそうです。
micro:bitのラジオ機能使って、もう一台のmicro:bitで動作をコントロールするようにしてみました、今は浮上と停止機能のみの実装ですが。
以下のムービーを見ると分かるように、同じ電圧でモーター駆動しているにも関わらず全体のバランスは取れてないだろうからドリフトします。チューニングでほぼ固定状態に持っていけるだろうと思いますが。ドローンならば自分の位置をセンスしてフィードバックしているはずですが、micro:bitにはそのような機能はありません。
admin
NiH電池(単三)では電力不足でプロペラ回らないので、大陸からほぼ一月かけて電池と接続ケーブルを入手。
電池の充電はコネクタの接続が全く安定しないので、接続ケーブル(オス)に付け替えて安定動作(ちゃんと充電)するようになりました。
ただし、USBコネクタ繋いだ状態で電池繋いでも充電開始されず、電池を繋いだ状態でUSBコネクタを繋ぐと充電開始されますが、そう言うふうにできているんでしょう。
これでホーバークラフトのモーターとMicro:bitに繋ぐとちゃんと動くはずだろうけど、テスターの電池切れて使えなくなったので(LR44)電池待ち。
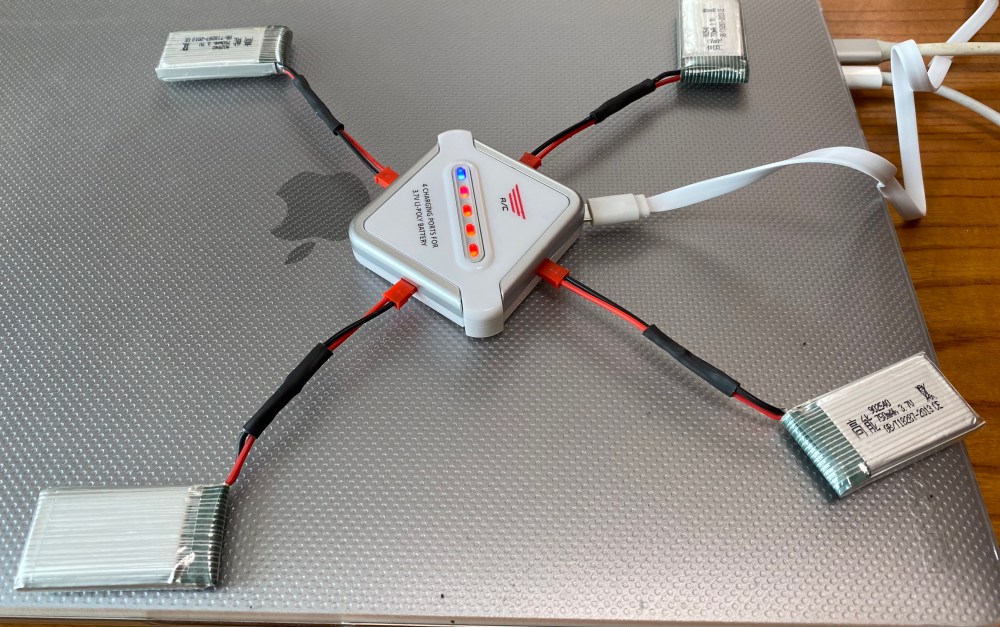
ケーブルはオスメスで、これでホーバークラフト本体に接続して充電時は取り外し。こちらのケーブルはちゃんと出来てる。

admin
隙間を塞ぐスカート(隙間テープ貼り付け)貼り付けて、電池(ニッケル水素電池直列4本)で駆動してみるけど、ファンの回転に元気がない。
電源電圧見てみるとほぼ半分に低下、つまり電流多すぎて電池内部抵抗でドロップしているから、この解は駄目そうで、普通にドローン用のリチウム電池使うしかなさそう。
ただし、ファンの回転数にccwとcwで差をつけてやると全体が自転しようとするから、ドローンと同じ理屈で姿勢制御はできそうです。
admin
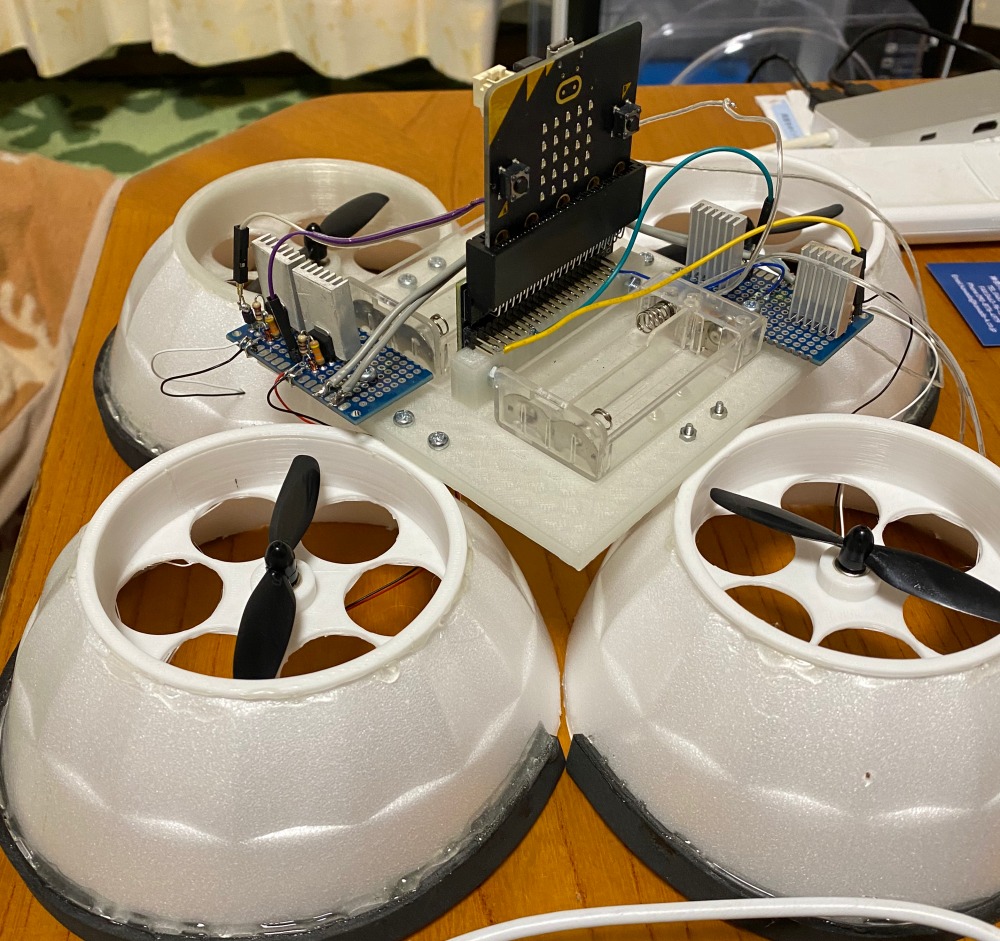
遅々としてますが、ヒートシンクも付けて、micro:bitのP0/P1/P2/P8ピンをPWM制御に使って、モーターを駆動してみました。
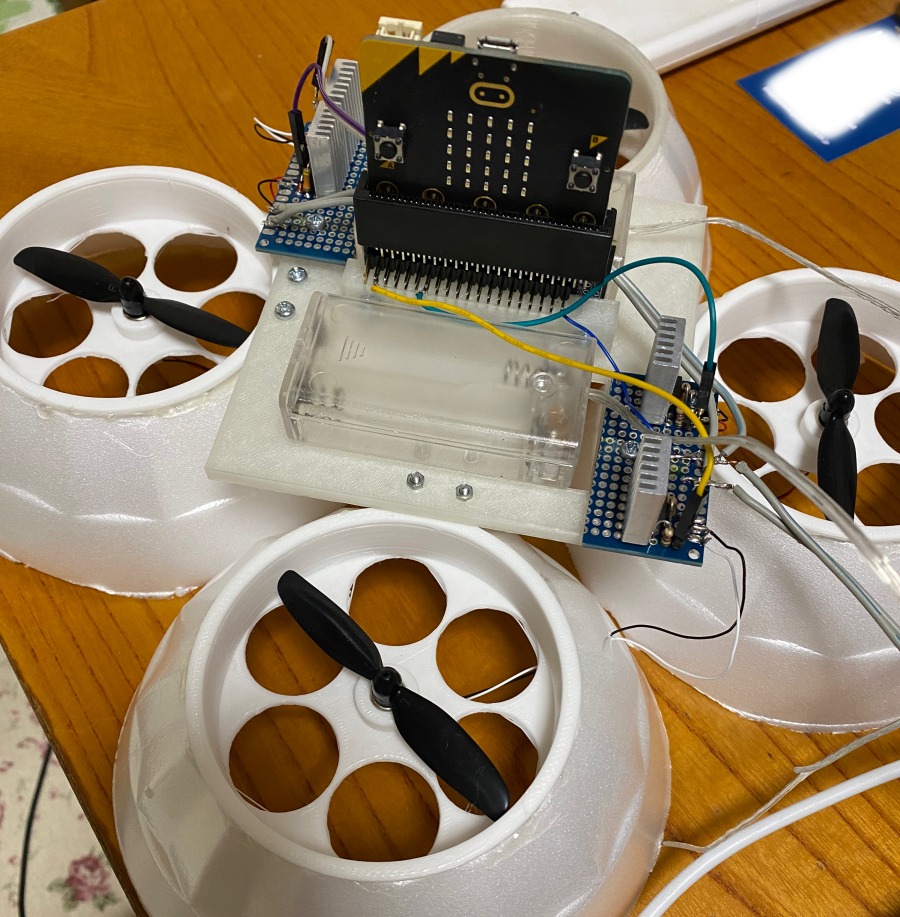
まだ電池ケースを実装していない、両面テープで貼り付け対応、ですが電池交換する時には両面テープから剥がさないとPWMコントローラーが巨大化したのでそこにつかえてしまうので対応できません。
電池ケース以外では、micro:bitの電源どうするかですが、単三NiH電池の3本直列ぐらいの電圧を供給するのが適切なので、電池ケースの1本分から引き出す方法も考えないといけない。
ホーバークラフトの機能として一番大切な浮上に関しては、スカートを作成してやらないとだめで、隙間テープを貼り付けてその役割をさせるつもり。
admin
ヒートシンクは必要そうなので、Amazonで購入したヒートシンク貼り付け。基盤はユニバーサルで、台(3Dプリンタ)作り直さなくて済むように取り付け穴を流用するので、対称形になっていません。
ヒートシンクの熱抵抗はそれほど低くなさそう(両面テープ貼り付け)なので、これはやってみるしか解らない。

回路図は前の記事と全く同じです。
admin