https://qiita.com/nnn112358/items/ea6b5e81623ba690343c
などで、M5stackの色指定は3バイトではなくuint16_tで指定されるので何でかなと思ったら、r/b : 5bit, g : 6bitの2バイトで表現されるんですね。
M5stackのディスプレイならば、それで問題ないだろうと思うし、メモリ使用量を少なくする考慮が種々なされてるから、それもアリなのでしょう。
admin

la vie libre
https://qiita.com/nnn112358/items/ea6b5e81623ba690343c
などで、M5stackの色指定は3バイトではなくuint16_tで指定されるので何でかなと思ったら、r/b : 5bit, g : 6bitの2バイトで表現されるんですね。
M5stackのディスプレイならば、それで問題ないだろうと思うし、メモリ使用量を少なくする考慮が種々なされてるから、それもアリなのでしょう。
admin
https://www.switch-science.com/catalog/8183/
レーザー距離計のモジュールの商品説明に、STEMMAという名称のインターフェースが出てきて初耳なので調べてみた。それに上のリンクの商品紹介で「STEMMA QT/Qwiic互換」ともあってQwiicって何者?
STEMMAはピンピッチ2mm(gloveと同じ)の専用インターフェースでi2c以外もサポート、一方STEMMA QTは小型化のためにコネクタが1mmピッチでかつi2c専用です。じゃSTEMMA QTとQwiicはなにがちがうの?が知りたいこと。
で検索すると、以下が一番分かりやすい。
https://learn.adafruit.com/introducing-adafruit-stemma-qt?view=all
Like Qwiic, STEMMA only uses the 4-pin connectors for I2C. The STEMMA QT connector is identical to the Qwiic connector and uses the same pin ordering.
Qwiic only has level shifting and voltage regulation on the controller, not devices. So, you can use STEMMA + STEMMA QT devices with any Qwiic controller and you can use Qwiic devices on a STEMMA controller if you set the voltage jumper from 5V to 3V
この距離計、ターゲットが複数個でも検出できるというのが優れもの。『ヒストグラムベースのテクノロジー』というのが、それに該当していそうです。
admin
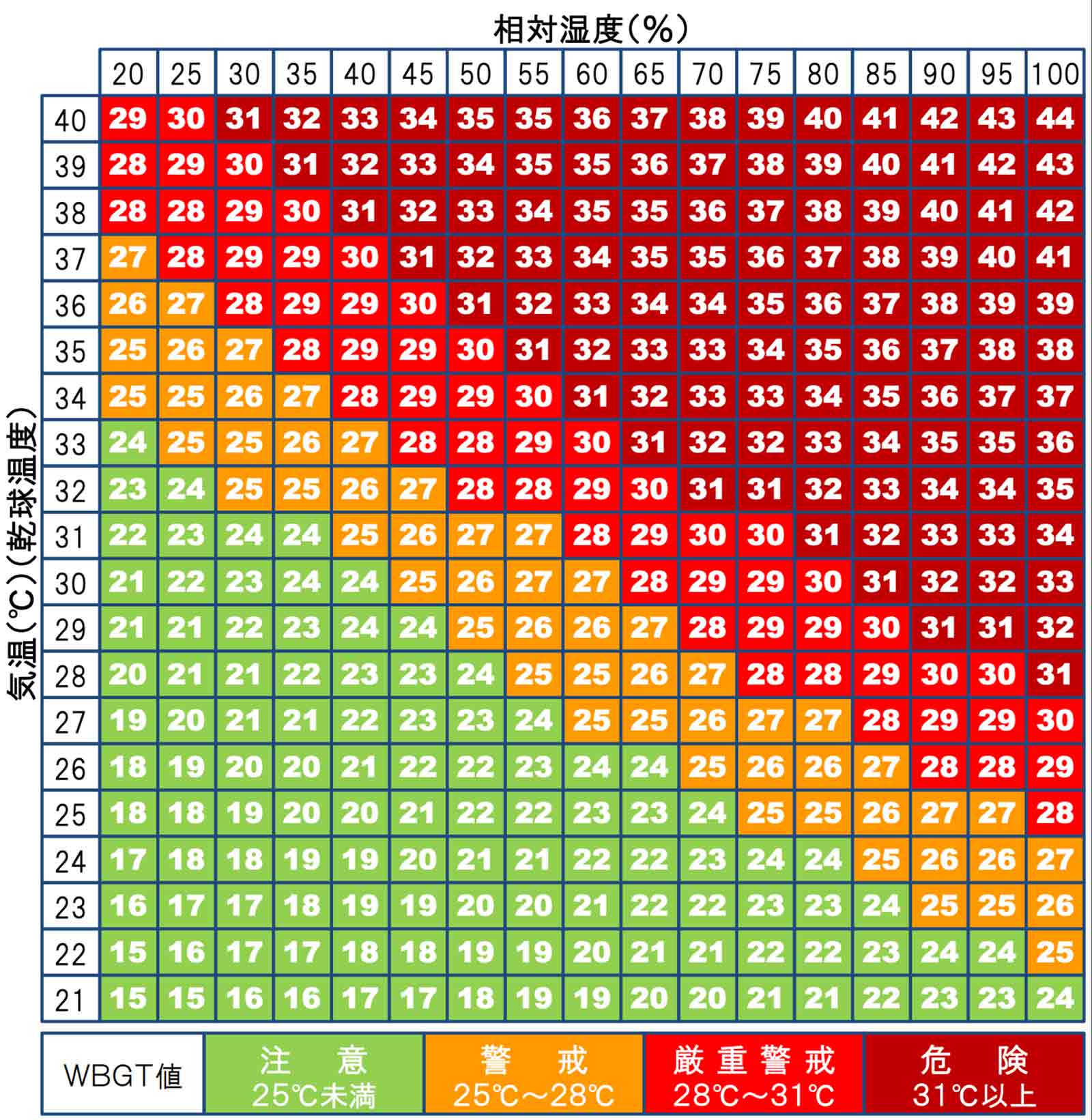
そろそろ夏も本番に近づいて、散歩も一時間が限界になりますが、暑さを客観的な数値にするにはWGBT指数(湿度と温度で判定)ですが、無論風のあるなし、直射日光下、人間の暑さ耐性、あるいは運動強度によって変わってくるので目安の数値ですが、i2cインターフェースの温湿度(気圧もある)センサーとM5stackで実現します。M5stackも電源入れっぱなしでなくて、時々チェックするぐらいなら電池120mAhでも使えると思う。
・用意したもの
M5Stack Basic V2.6
M5Stack用温湿度気圧センサユニット Ver.3(ENV Ⅲ)
いずれもいつものスイッチサイエンスで購入。
センサーのライブラリとサンプルコードは以下からダウンロード。
・サンプルコード@GitHub
・unit_env
以下をVScodeのソースディレクトリに展開します。
https://github.com/m5stack/UNIT_ENV
・USBドライバー
M5stackへのバイナリのアップロードで以下のようなエラー発生、これはM5Stack Basic V2.6でUSB-serialのICが変わっていて、標準のOSではまだサポートしていないからだと、スイッチサイエンスのページにも記載あります。
Uploading stub…
A fatal error occurred: Failed to write to target RAM (result was 01070000: Operation timed out)
*** [upload] Error 2
しかし、
https://mag.switch-science.com/2021/11/01/m5stack-v2-6-changes/
に書いてある様にやってみてもダメで、
platformio.iniに以下のようなポート決めうち指定で解決しました。

ポート番号は環境で変わると思うので、wch以降は、
/devディレクトリで
% ls tty.wch* を実行して確認しましょう。PIO HomeのDevicesではそのままの値が確認できますが。
tty.wchusbserial54260147311
・WBGT指数
https://healthy-ecohouse.com/wp-content/uploads/2019/08/190804-4.jpg
からダウンロード
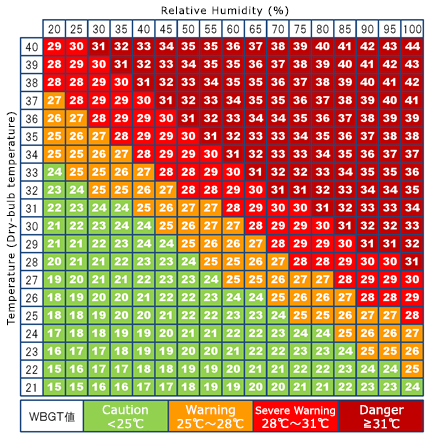
このテーブルをソースの中に二次元配列で埋め込んで、WBGT値を獲得しています。
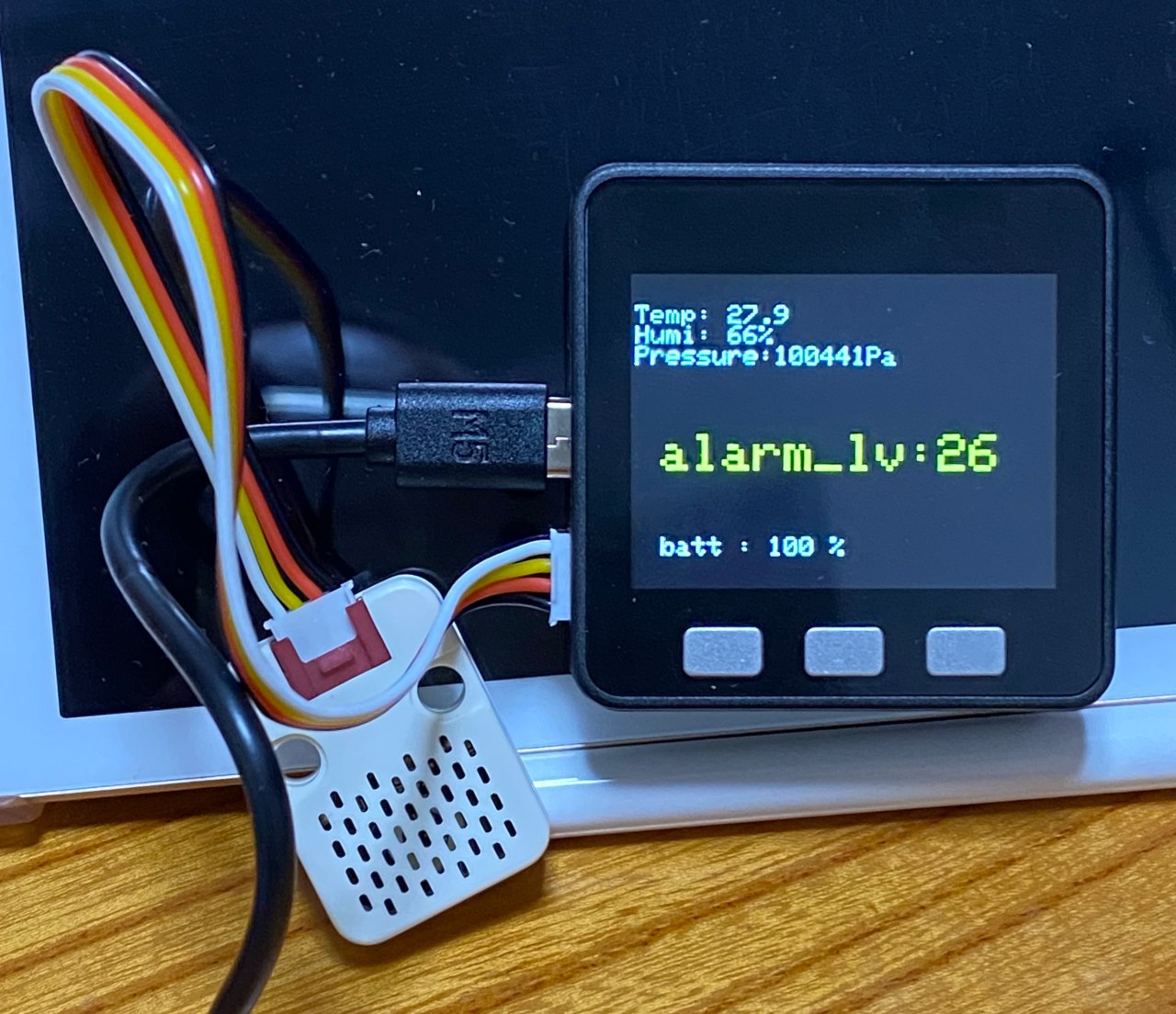
画面はこんな感じです。
全部のコードは、
https://github.com/chateight/PlatformIO/tree/master/heat_alarm/src
heat_alarm.cpp以外はセンサーアクセス用のライブラリファイルです。
P.S. @2022/6/22
表示方法変更しました、テキストよりもカラーブロックで表示がわかりやすいから。
気圧の使い道は何なのかなと考えると、一番分かりやすいのは標高を簡易的に知るということになると思う。およそ100m高くなると10hPa気圧は低下するのだから。
P.S.2 @2022/6/25
ということで、大まかな高度も表示するようにしました。気圧は揺れ動くから、刻みは200m刻みで山に行ったときぐらいには使えるレベル。正確に出すならばGPSモジュール使うのだろうけど、そこまでは不要でセンサーの機能があるから使ってみようぐらいの話。
admin
流石に常時rootログインでコマンド実行は危険なので、sudoは必要ですが、sudoはデフォルトでは実行できませんが、sudoできるようにする方法(Jupter notebookでコマンド実行すればいい、なぜならroot権限で動作しているから)はいろいろなところで記事になっていますが、
例えば、
https://tanokatu.com/2021/06/09/linux-m5stack-unitv2-2/
Jupyter notebookに入って”新規” – ”ターミナル”を開いて、以下を実行というものですが、
# chown root:root /usr/bin/sudo && chmod 4755 /usr/bin/sudo
# chown root:root /usr/libexec/sudo/sudoers.so
# chown root:root /etc/sudoers
これでsudoは実行できてもsuは実行できません。特に必要性もないとは思いますが。また、これだけならばsshをrootログインして実行しても同じことでしょう。
admin
UnitV2カメラの取り付けネジですが、M6ではありますがピッチが標準では無い模様。なぜなら1mmピッチネジだと途中で止まるから、かといってもちろん細目ネジ(0.75mmピッチ)ではない。
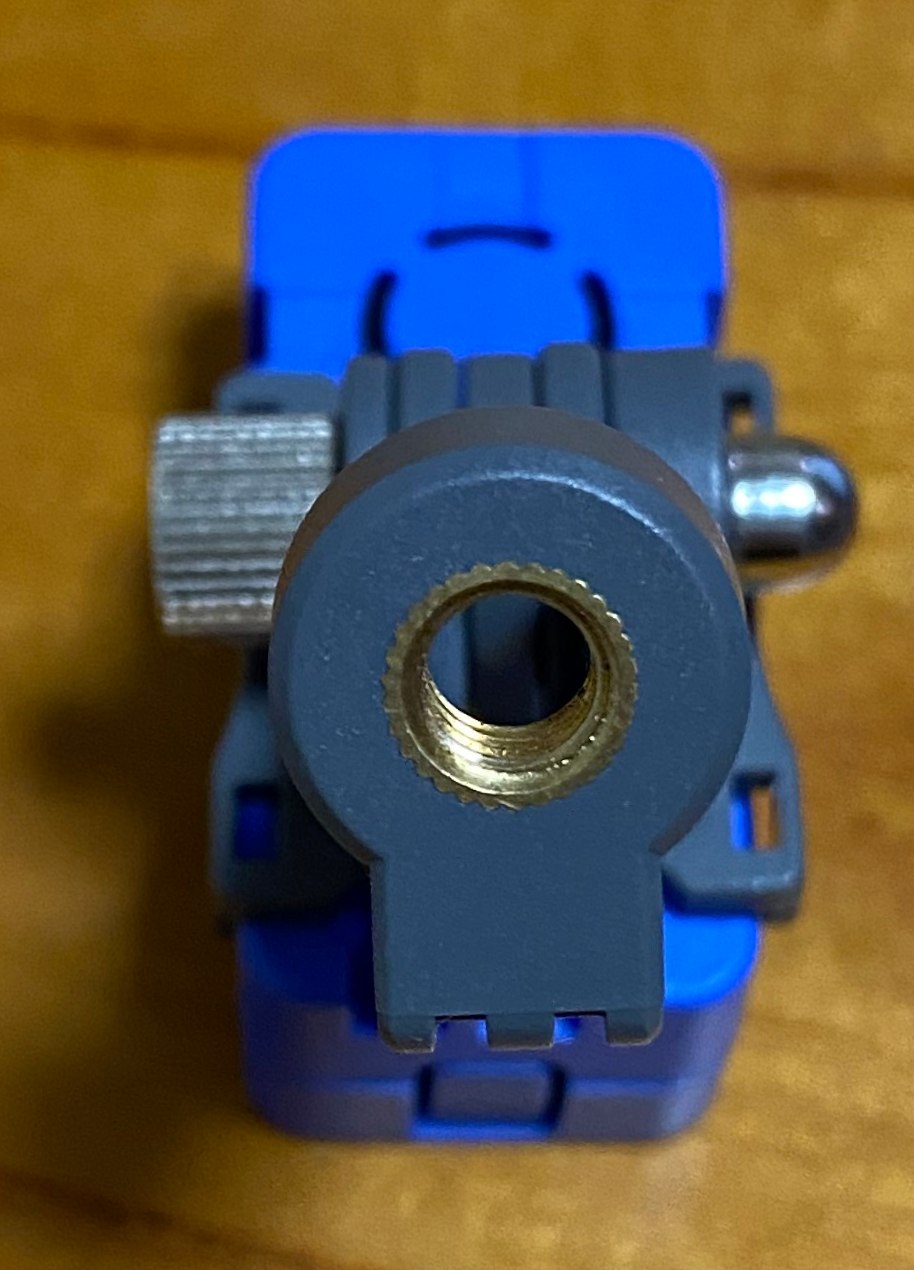
写真で見てみると、インサート埋め込まれている部分の厚みがおよそ6mmでネジ山が5つ見えるから1.25mmピッチらしいけど、そんなネジは普通はないと思うけどネットで検索するとカメラ固定用の三脚とか使えてるらしいから存在はするらしい。
P.S.(@2022/6/12)
手元のスマホ用三脚のスマホ固定部分を取り外したベースのネジはピッチ1.25mmのようでUnitV2にもフィット。どうもこのサイズは固定を素早くやるための特殊(標準)サイズのようです。
-> と思ったら、どうもカメラ固定用のネジはインチネジ(1/4″)ですね。それなら全てクリア。1/4-20 UNCと言われるネジで、ピッチは25.4/20 = 1.27mmになります。

admin
渋沢栄一のこの本は有名ですが、最近宮崎市定全集の『論語』を読んでいて改めて『論語と算盤』のことを思い出す。
論語と算盤に書かれていることは、① 社会に害を与えることなく正しく生きて、② 社会に貢献できるように利益を出しなさいということだろうと思うけれども、それって最近話題のSDG然りで時代環境と共に多少の変遷はあるけれども本質においてビジネスの基本であることに変わりはない。
一番近いと思える考え方はbusiness ethicsとでもいうべきものでは無いかなと思うけれども。してみるとおよそ2,500年前の論語が現代でもかなり通用するというのは、人類というのはわずか数千年では全く進化していないということになります。
admin
登録した顔画像のマッチング結果をシリアルでM5stackに送信して、確かさがある一定以上ならばブザーで知らせるという簡単なアプリです。
https://isehara-3lv.sakura.ne.jp/blog/2022/05/24/unitv2-aiカメラとm5stackをgroveコネクタで接続して認識結果を/
のアップデートの形になります。
<シリアルのデータ形式>
顔認証でシリアルから流れるデータは、
{“num”:1,”face”:[{“x”:92.80541992,”y”:0,”w”:366.1600952,”h”:478,”prob”:0.995221317,”match_prob”:0.659739733,”name”:”face_1″,”mark”:[{“x”:194,”y”:178},{“x”:358,”y”:158},{“x”:292,”y”:246},{“x”:228,”y”:356},{“x”:368,”y”:338}]}],”running”:”Face Recognition”}
こんな感じで、JSONで階層構造と配列を使っています。マッチング閾値(match_prob)へのアクセスは["face"][0]["match_prob"]となります。
#include <M5Stack.h>
#include <arduinojson.h>
#include <softwareserial.h>
SoftwareSerial Grove(22, 21); // define rx/tx connecting to the UnitV2 camera
// SoftwareSerial(rxPin, txPin, inverse_logic)
float x;
int y;
long k;
char data[1000];
void setup() {
M5.begin();
M5.Lcd.setCursor(20, 40);
M5.Lcd.setTextSize(2);
M5.Speaker.begin();
Serial.begin(115200);
Grove.begin(115200);
M5.Lcd.print("--initialized--"); // display M5 Lcd message
M5.Lcd.setCursor(20, 70);
M5.Lcd.print("Face recongition");
}
void loop_(){
if(Grove.available()) {
String recvStr = Grove.readStringUntil('\n');
if(recvStr[0] == '{'){
Serial.print(recvStr);
}
}
}
void readJSON(void){
String recvStr = Grove.readStringUntil('\n');
StaticJsonDocument<1024> doc;
DeserializationError error = deserializeJson(doc, recvStr);
if (error) {
Serial.print(F("deserializeJson() failed: "));
Serial.println(error.f_str());
return;
}
x = doc["face"][0]["match_prob"];
}
void loop(){
M5.Speaker.mute();
if(Grove.available()) {
readJSON();
Serial.println(x);
if (x > 0.7f)
{
M5.Speaker.setVolume(3);
M5.Speaker.beep();
delay(200);
}
}
}
データのバイト数が結構大きく(800バイト以上)なるので、char data[1000]とStaticJsonDocument<1024>を大きめのサイズにしています。これをしないとM5stackがリブート繰り返しました。
ドキュメント(以下のリンク)によれば、StaticJsonDocumentは1KB以下の小さめのJSONファイルで使えとあります。それほど多くないスタックエリアを使うので、StaticJsonDocumentでの設定値が小さくてスタックオーバーフローを起こしたと思われ、M5stackがリブートを繰り返してました。
https://arduinojson.org/v6/api/staticjsondocument/
認識の閾値は流れるデータからmatch_probを0.7以上で判断しています。
M5.Speaker.tone()は動作しなかったのでbeepを使って音出ししています。
P.S. @2022/6/16
細かな体裁(UnitV2のAP立ち上がり検知、認識結果の顔IDプリントアウト)を整えました。ソースはこちらに、
https://github.com/chateight/UnitV2_camera/tree/master/src
admin
デフォルトでは動画再生モードになっていますが、変更する方法です。
ブラウザで、
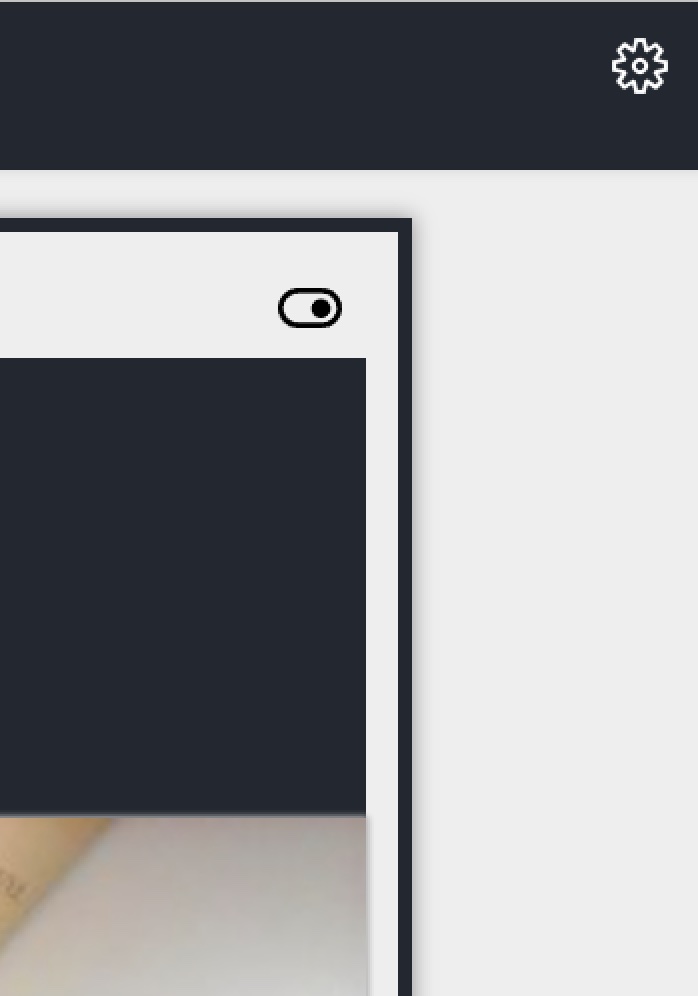
歯車マークを選択、
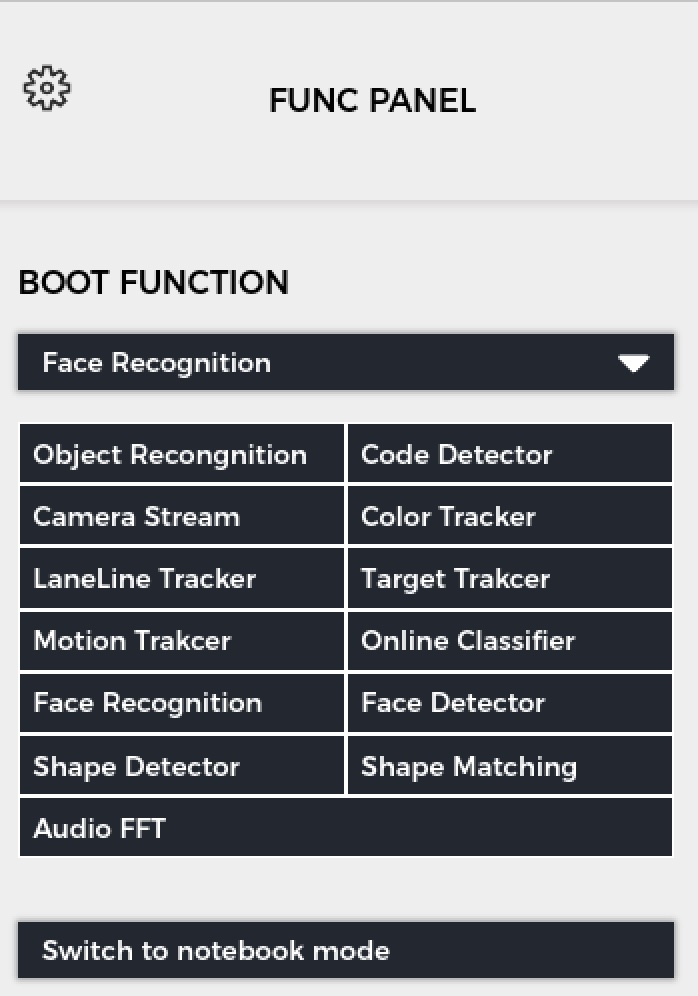
メニューで、初期設定したい機能を選択するだけです。例えばシリアルで顔認識結果を送り出したい時にはこういうふうに設定しておけば、電源投入すれば自動的に顔認識モードで認識結果を他のデバイスで受信できると思ったけど、一度ブラウザで立ち上げないと認識結果は送られてこないから、ブラウザ経由のHTTPリクエストなしでは起動はしないようです。バックグランドで認識結果を送る仕組みはjs(Ajax)からpythonを呼び出しているというようなやり方なのでしょう。
シリアルポート経由のJSON形式で動作モード設定は、以下のUnitV2の公式ドキュメントのリンクから。
https://docs.m5stack.com/en/quick_start/unitv2/base_functions
今更ですが、UnitV2への接続方法には公式ドキュメントによれば① USB経由、② APポイントモードの二つの方法があります。
–Ethernet Mode Connection: UnitV2 has a built-in wired network card. When you connect to a PC through the TypeC interface, it will automatically establish a network connection with UnitV2.
–AP mode connection: After UnitV2 is started, the AP hotspot (SSID: M5UV2_XXX: PWD:12345678) will be turned on by default, and the user can establish a network connection with UnitV2 through Wi-Fi access.
UnitV2に電源を他から供給できればAPモードで接続が便利だと思います。
admin
初めて知った名前ですが、生まれは一世代ぐらい早いですがMozartとほぼ同世代人と言って良いと思う。つまり宮廷音楽の華やかなりし時代は共通しています。
曲風はBenda様式というそうで、もちろんMozartの景色とは違いますが、パトロンである諸侯の趣向を反映するだろうから香りは似ているのはやはり時代の必然というべきでしょう。
admin
デフォルトでは小容量のLi-ion電池が内蔵されていますが、残量を知る方法が必要な時があります。完全放電してしまうと電池は再生不能になるし。
https://m5stack-build.hatenablog.com/entry/2019/10/05/233914
で電池残量表示していたので、該当部分だけのコードを引き出して、既存のプロジェクト、
https://isehara-3lv.sakura.ne.jp/blog/2022/02/04/1095/
に埋め込みました。
コア部分だけ抜き出すと以下の通り。setup_batt()が初期化、read_batt()が残量読み取りです。
void setup_batt()
{
M5.begin();
M5.Power.begin();
}
int read_batt()
{
int l_battery = M5.Power.getBatteryLevel();
return l_battery;
}ソースコードは、
https://github.com/chateight/servo_
になります。ファイル追加のついでに、汚かった構造(ヘッダーファイルにソースコード混在など)を書き直してます。
おそらく、どのプロジェクトでも電池残量表示はデフォルトで必要だろうと思う。
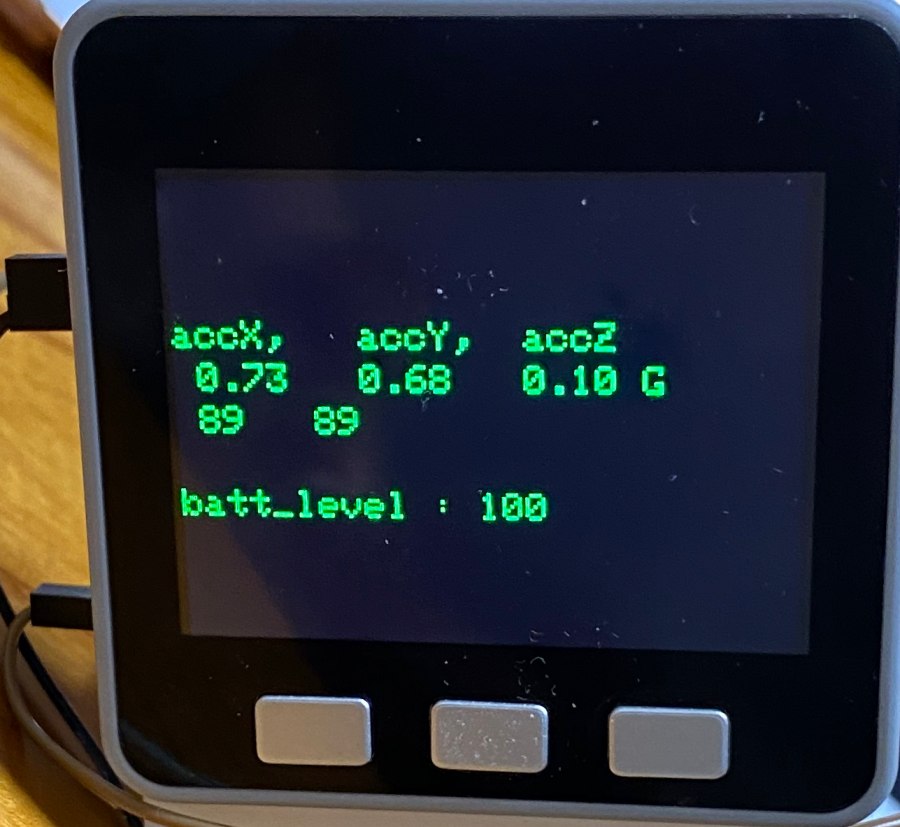
今は満充電のようですが、表示はおそらくそれほどの精度はなくて目安だろうと思う。
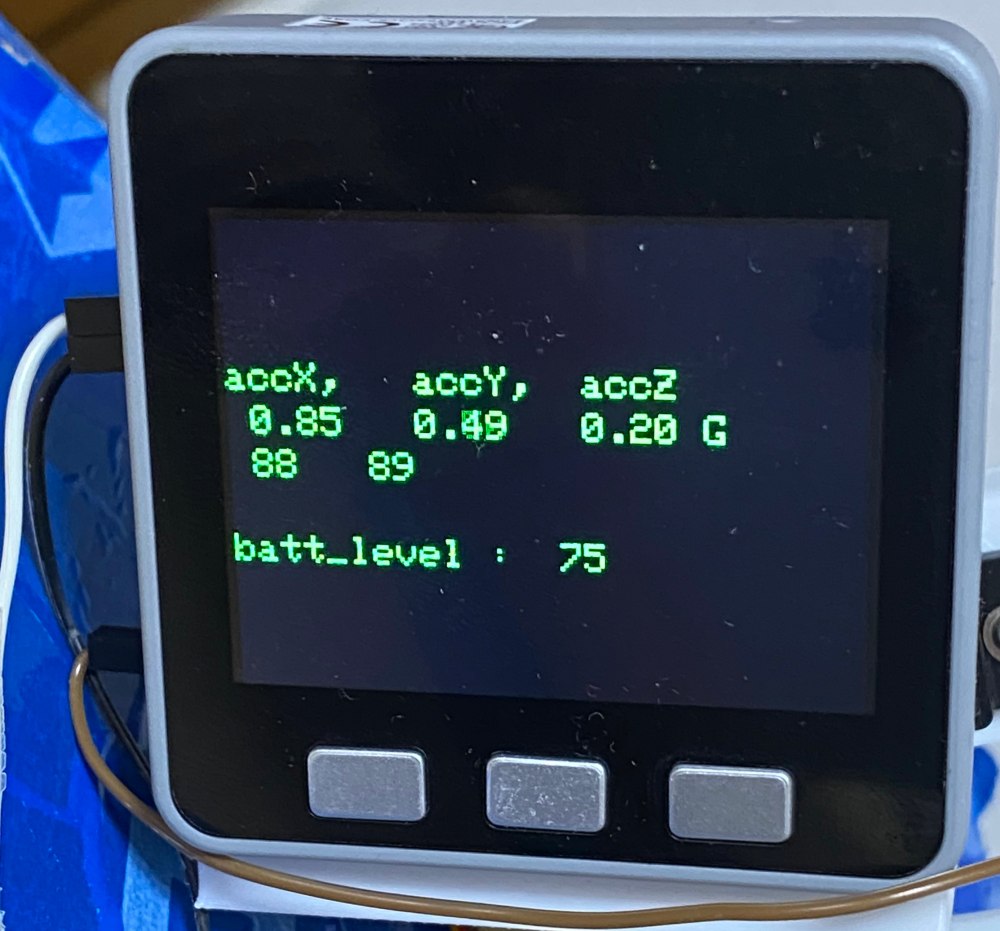
P.S.
2日ぐらい経過してみてみたら75%表示になっているから機能はしている。ただし分解能は25%らしい。
admin
{kind=link}