gobotはrobotics/IoT用のフレームワークですが、サポートモデルとしてTelloが対象に含まれています。
https://gobot.io/blog/2018/04/20/hello-tello-hacking-drones-with-go/
でコマンド制御と動画再生を行っているので、コードを実行してみました。
動画の再生にはmplayer(これは追加インストール必要でした)を使って、goから引き渡しています。
$ brew install mplayer
でインストールします。go getでもmplayerがインストールできますが、外部アプリなのでこちらではない。
<環境構築>
Goはインストール済みの前提で、gobotの他にdji/telloのインストールも必要。これはmod内でしかインストールできません。
% go get -d -u gobot.io/x/gobot/...
% go get gobot.io/x/gobot
% go get gobot.io/x/gobot/platforms/dji/tello<Telloから画像受け取り再生するコード>
Telloの素のコマンドは意識する必要はなくて関数でwrapされています。明示的に並行処理は使っていなくて、drone.On()はイベント待ちのように見えます。
package main
import (
"fmt"
"os/exec"
"time"
"gobot.io/x/gobot"
"gobot.io/x/gobot/platforms/dji/tello"
)
func main() {
drone := tello.NewDriver("8890")
work := func() {
mplayer := exec.Command("mplayer", "-fps", "25", "-")
mplayerIn, _ := mplayer.StdinPipe()
if err := mplayer.Start(); err != nil {
fmt.Println(err)
return
}
drone.On(tello.ConnectedEvent, func(data interface{}) {
fmt.Println("Connected")
drone.StartVideo()
drone.SetVideoEncoderRate(4)
gobot.Every(100*time.Millisecond, func() {
drone.StartVideo()
})
})
drone.On(tello.VideoFrameEvent, func(data interface{}) {
pkt := data.([]byte)
if _, err := mplayerIn.Write(pkt); err != nil {
fmt.Println(err)
}
})
}
robot := gobot.NewRobot("tello",
[]gobot.Connection{},
[]gobot.Device{drone},
work,
)
robot.Start()
}
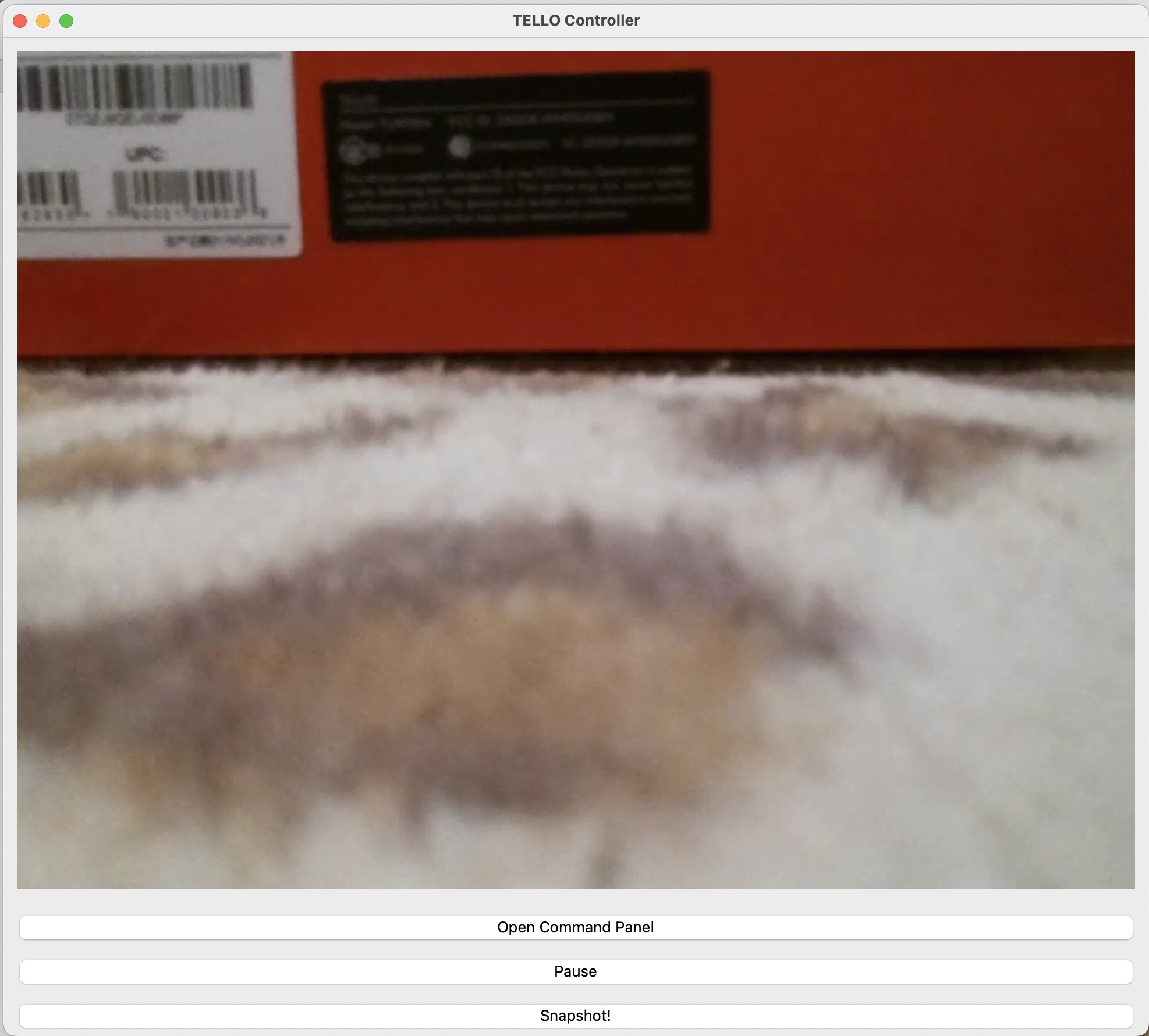
動画は外部のアプリを使っているせいか、遅延が大きいのと画素が飛んでいます。gobotの本質とはそれほど関係ないですが、
gobotはこれからも成長していくだろうから、Robotics/IoTアプリ開発はかなり楽になりそうです。
admin