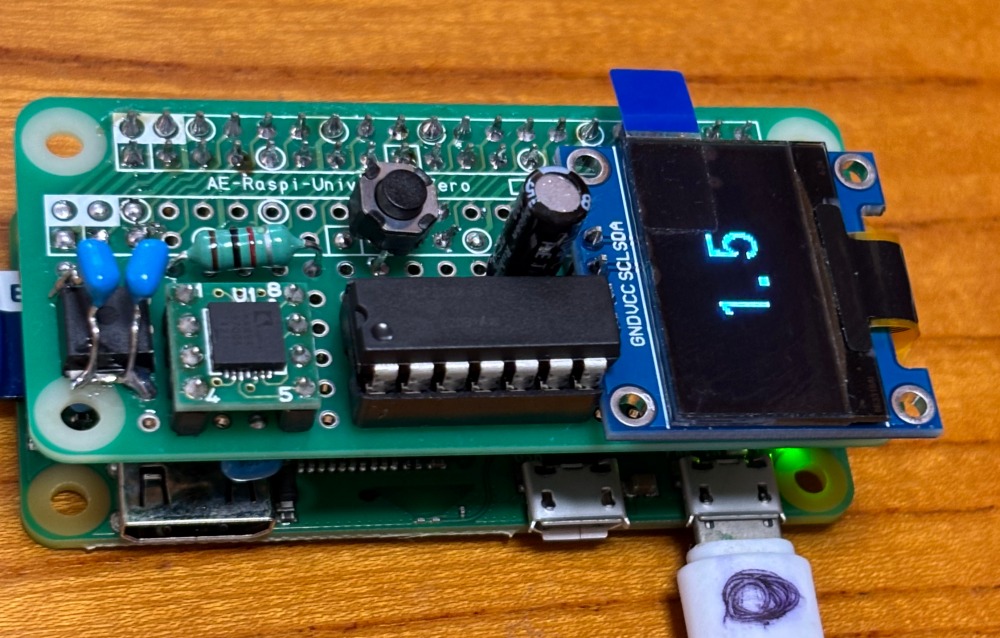
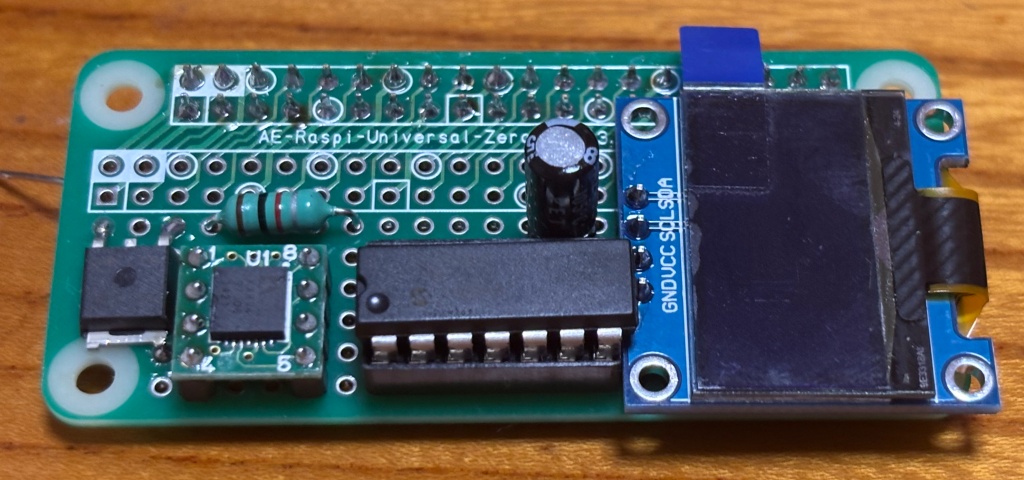
取り敢えずOLCDに震度測定値を表示できるようにした。あとラズパイのシャットダウンがネットワーク未接続でも対応できるようにシャットダウンボタンを追加、

現時点でのコード
<seismic.py>
#
# core code is as follow
# https://github.com/p2pquake/rpi-seismometer/blob/master/seismic_scale.py
#
import time
import datetime
import math
import socket
import spidev
import os
import sys
import RPi.GPIO as GPIO
import subprocess
# FPS制御 -----
# ターゲットFPS
target_fps = 200
start_time = time.time()
frame = 0
# initial skip
skip = 7
# Shut down sw is assigned to GPIO17
# GPIO initialize
SHUTDOWN = 17
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(SHUTDOWN, GPIO.IN)
GPIO.setup(SHUTDOWN, GPIO.IN, pull_up_down=GPIO.PUD_UP)
# wait for spidev driver ready
time.sleep(20)
def handle_sw_input():
# wait key inout event
def switch_callback(gpio_pin):
subprocess.call('sudo shutdown -h now', shell=True)
#
GPIO.add_event_detect(SHUTDOWN, GPIO.FALLING,bouncetime=250)
# when the sw was pushed, call the 'call back routine'
GPIO.add_event_callback(SHUTDOWN, switch_callback)
return
handle_sw_input()
# SPIセンサ制御 -----
spi = spidev.SpiDev()
spi.open(0,0)
spi.max_speed_hz = 1000*1000
def ReadChannel(channel):
adc = spi.xfer2([(0x07 if (channel & 0x04) else 0x06), (channel & 0x03) << 6, 0])
data = ((adc[1] & 0x0f) << 8 ) | adc[2] return data # reset the seisamic intensity with open("/home/pi/python/value.txt", "w") as file: file.write("0") file.close() # 加速度データ制御 ----- # A/Dコンバータ値 -> ガル値 係数
ad2gal = 1.13426
# 0.3秒空間数
a_frame = int(target_fps * 0.3)
# 地震データ -----
adc_values = [[1] * target_fps, [1] * target_fps, [1] * target_fps]
rc_values = [0, 0, 0]
a_values = [0] * target_fps * 5
adc_ring_index = 0
a_ring_index = 0
# リアルタイム震度計算 -----
while True:
# リングバッファ位置計算
adc_ring_index = (adc_ring_index + 1) % target_fps
a_ring_index = (a_ring_index + 1) % (target_fps * 5)
# 3軸サンプリング
for i in range(3):
val = ReadChannel(i)
adc_values[i][adc_ring_index] = val
# フィルタ適用及び加速度変換
axis_gals = [0, 0, 0]
for i in range(3):
offset = sum(adc_values[i])/len(adc_values[i])
rc_values[i] = rc_values[i]*0.94+adc_values[i][adc_ring_index]*0.06
axis_gals[i] = (rc_values[i] - offset) * ad2gal
# 3軸合成加速度算出
composite_gal = math.sqrt(axis_gals[0]**2 + axis_gals[1]**2 + axis_gals[2]**2)
# 加速度リングバッファに格納
a_values[a_ring_index] = composite_gal
# 0.3秒以上継続した合成加速度から震度を算出
seismic_scale = 0
min_a = sorted(a_values)[-a_frame]
if min_a > 0:
seismic_scale = 2 * math.log10(min_a) + 0.94
# 0.1秒おきに出力
if frame % (target_fps / 1) == 0:
if seismic_scale > 0.5:
if skip > 1:
skip -= 1
else:
with open("/home/pi/python/value.txt", "w") as file:
file.write(str(round(seismic_scale, 1)))
file.close()
#print(datetime.datetime.now(), "scale:" , round(seismic_scale, 2), " frame:", frame)
# 次フレームの開始時間を計算
frame += 1
next_frame_time = frame / target_fps
# 残時間を計算し、スリープ
current_time = time.time()
remain_time = next_frame_time - (current_time - start_time)
if remain_time > 0:
time.sleep(remain_time)
# フレーム数は32bit long値の上限あたりでリセットしておく
if frame >= 2147483647:
start_time = current_time
frame = 1
表示(disp1.py)にはvalue.txtファイルを介在してデータ渡してます、時間情報と合わせてsqlite3に格納するようにする予定
<disp1.py>
import time
import board
import digitalio
from PIL import Image, ImageDraw, ImageFont
import adafruit_ssd1306
# Define the Reset Pin
oled_reset = digitalio.DigitalInOut(board.D4)
# Change these
# to the right size for your display!
WIDTH = 128
#HEIGHT = 32 # Change to 64 if needed
HEIGHT = 64 # Change to 64 if needed
BORDER = 5
# Use for I2C.
i2c = board.I2C()
oled = adafruit_ssd1306.SSD1306_I2C(WIDTH, HEIGHT, i2c, addr=0x3C, reset=oled_reset)
# Use for SPI
# spi = board.SPI()
# oled_cs = digitalio.DigitalInOut(board.D5)
# oled_dc = digitalio.DigitalInOut(board.D6)
# oled = adafruit_ssd1306.SSD1306_SPI(WIDTH, HEIGHT, spi, oled_dc, oled_reset, oled_cs)
# Clear display.
oled.fill(0)
oled.show()
# Create blank image for drawing.
# Make sure to create image with mode '1' for 1-bit color.
image = Image.new("1", (oled.width, oled.height))
# Get drawing object to draw on image.
draw = ImageDraw.Draw(image)
# Load default font.
font = ImageFont.truetype("fonts-japanese-gothic.ttf", 32)
#font = ImageFont.load_default()
# Draw Some Text
while True:
with open("/home/pi/python/value.txt", "r") as file:
text = file.read()
image = Image.new("1", (oled.width, oled.height))
draw = ImageDraw.Draw(image)
#text = str(mag)
(font_width, font_height) = font.getsize(text)
draw.text(
(oled.width // 2 - font_width // 2, oled.height // 2 - font_height // 2),
text,
font=font,
fill=255,
)
# Display image
oled.image(image)
oled.show()
time.sleep(1)
震度は対数メモリでの尺度だから、震度七の強烈さはよく実感できます。
admin