
Arduino IDEはもっさり感もありますが、機能も不足していて本格的に使おうとするとイマイチ
じゃVScode + PlatformIOどうなのと言うと、ラズパイ財団の関係からラズピコは公式サポートなし、と言うわけなのでラズパイ財団おすすめのVScodeの拡張機能(Raspberry Pi Pico)を使う、名前そのままですがVScodeの拡張機能で出てくるのでそれをインスト
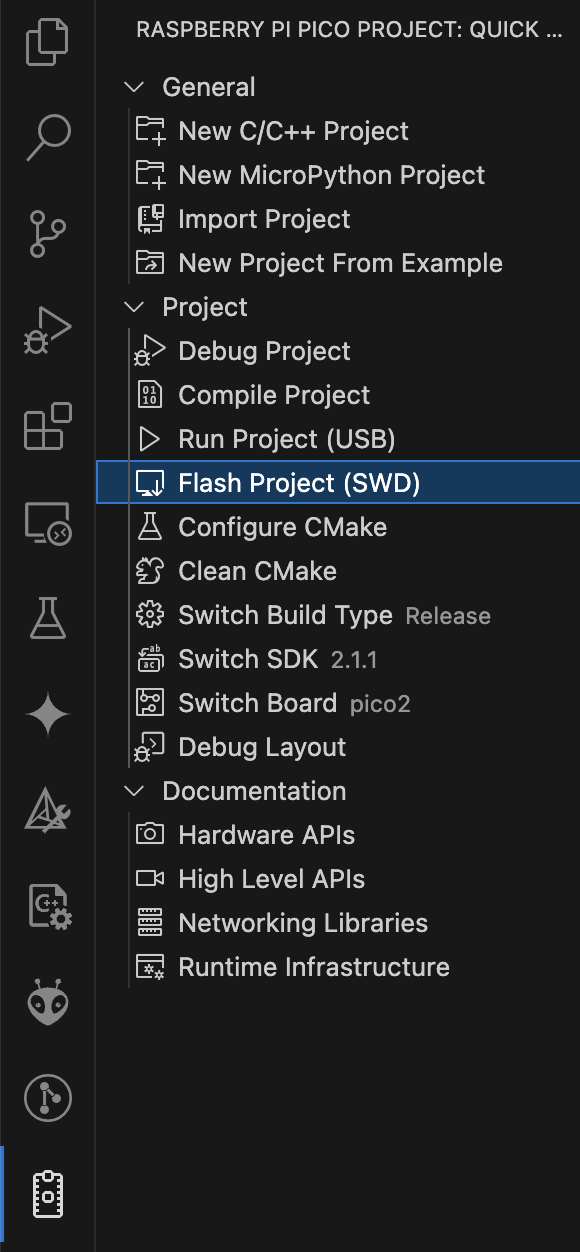
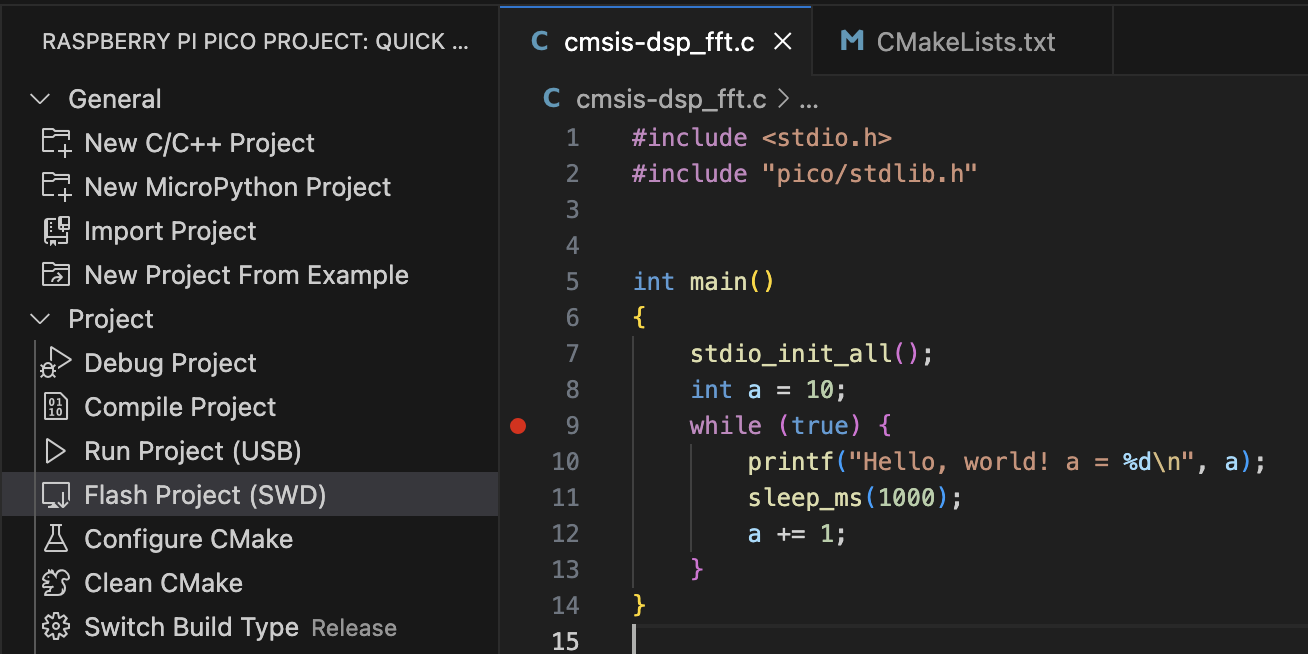
プロジェクト管理画面から、作成、ビルド、書き込み、デバッグができます
定番のHello worldコードがデフォルトで作成(一部変更しています)されるので、
#include
#include "pico/stdlib.h"
int main()
{
stdio_init_all();
int a = 10;
while (true) {
printf("Hello, world! a = %d\n", a);
sleep_ms(1000);
a += 1;
}
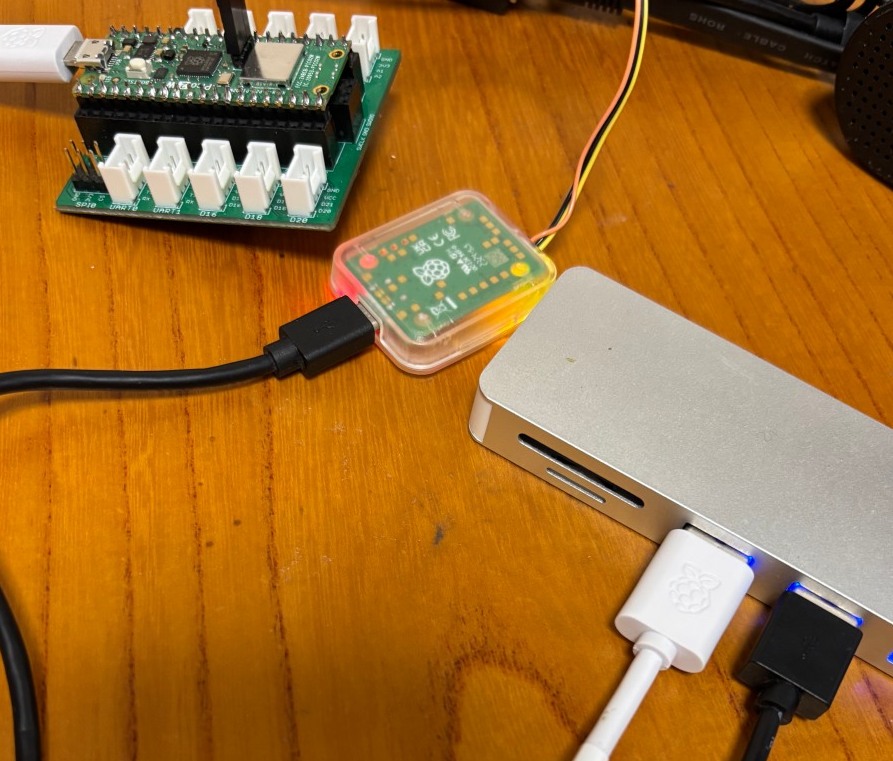
} ビルドしてラズピコ2にデバッガ経由で転送、
シリアル出力の有効化は、
% ls /dev/tty.*
/dev/tty.Bluetooth-Incoming-Port /dev/tty.usbmodem1202
/dev/tty.debug-console /dev/tty.usbmodem1301usbmodemが二個見えてますが、どちらか一方はデバッガー
二つしかないから、交互に選択してみると、
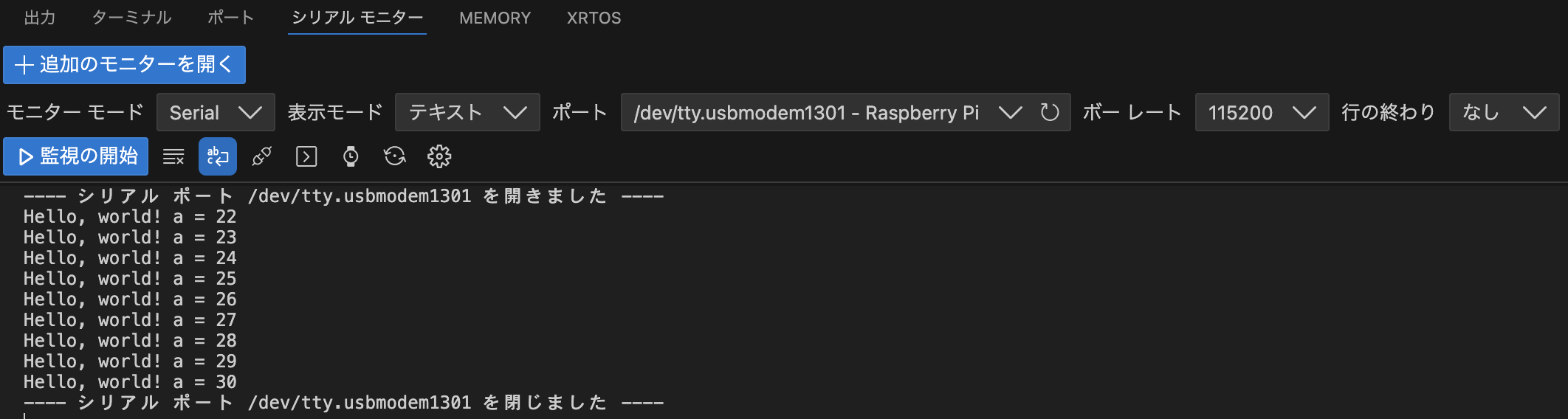
USB-Serialでコンソールに出力されています
デバッガは、
こんな感じで普通に動作、変数aはコンパイラの最適化でprintf文中で使わないと落とされます、デバッガ機能確認用に定義したがprintfで使わないとデバッガで見えない
admi