
VScodeのラズピコエクステンション(Raspberry Pi Pico)にいくつかのサンプルコードがあるのでその中から内蔵ADCからDMA転送するコードがあるので、ついでにADCの精度も見てみた
<環境>
M4 MacBook, VScode、ラズピコエクステンション(Raspberry Pi Pico)使用
<変更箇所>
・結果を4bitシフトで8bitにしてるのを12bit獲得する
・ADC読み出し値の最大値と平均値を求める処理追加(GPIO26はGND接続)
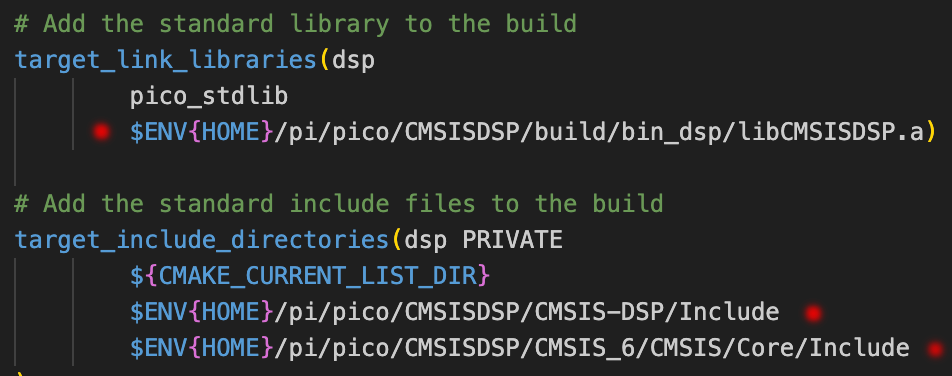
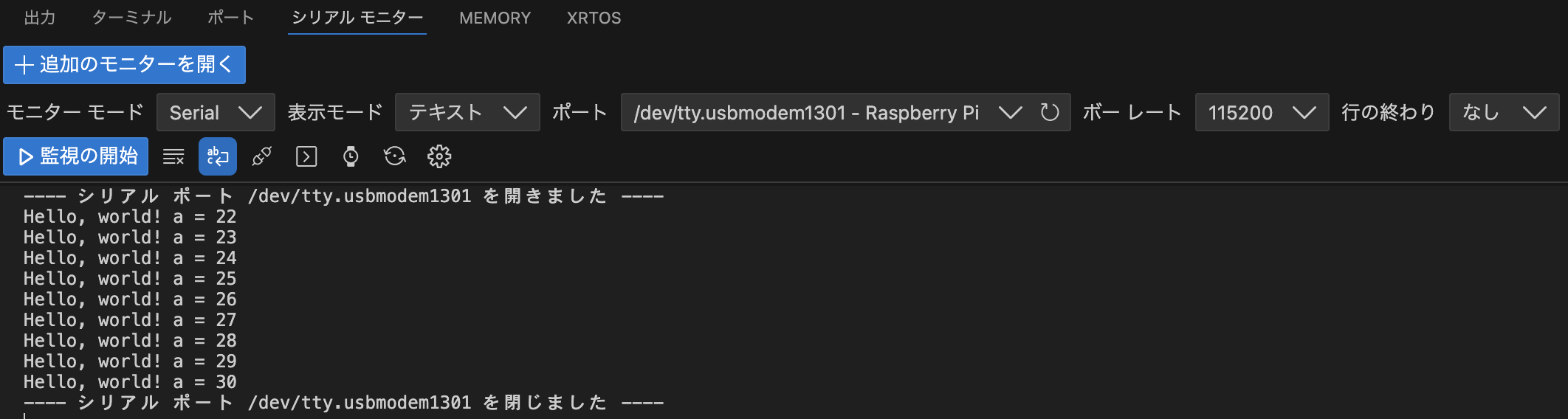
・USBシリアルを使えるようにCMakeに追加(但し動作がイマイチ不安定、予想外の時に出力されて、期待した時は出力されない、なのでデバッガに期待)
![]()
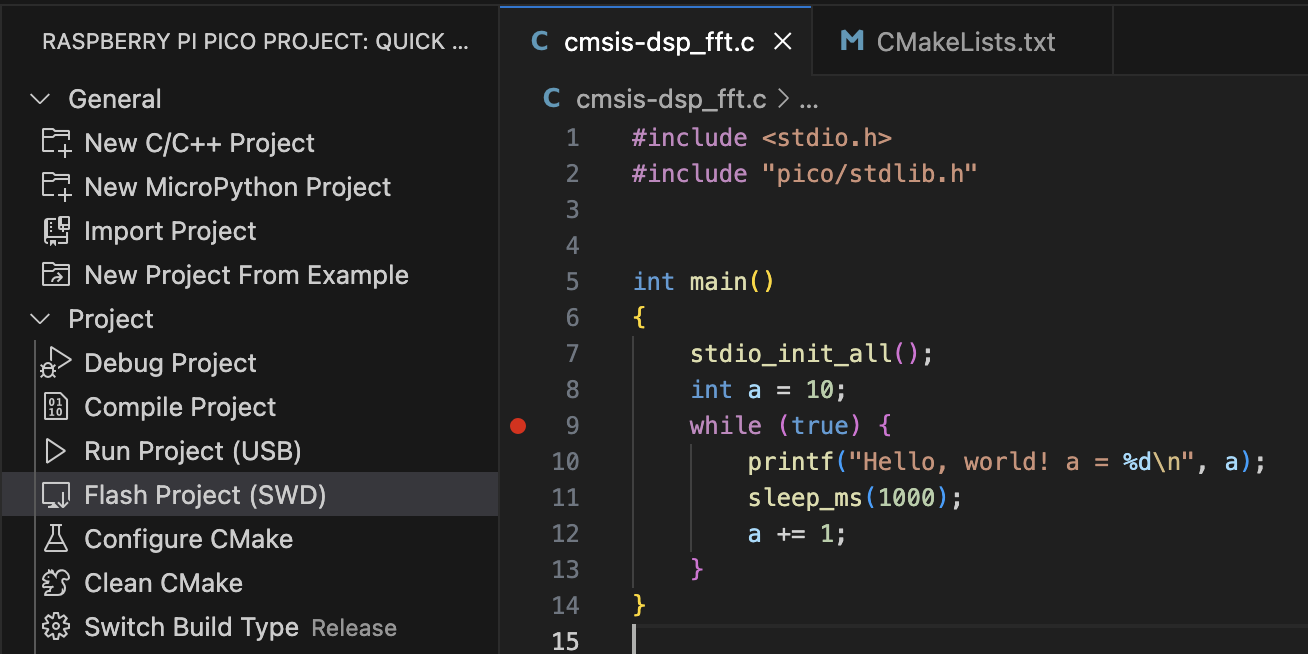
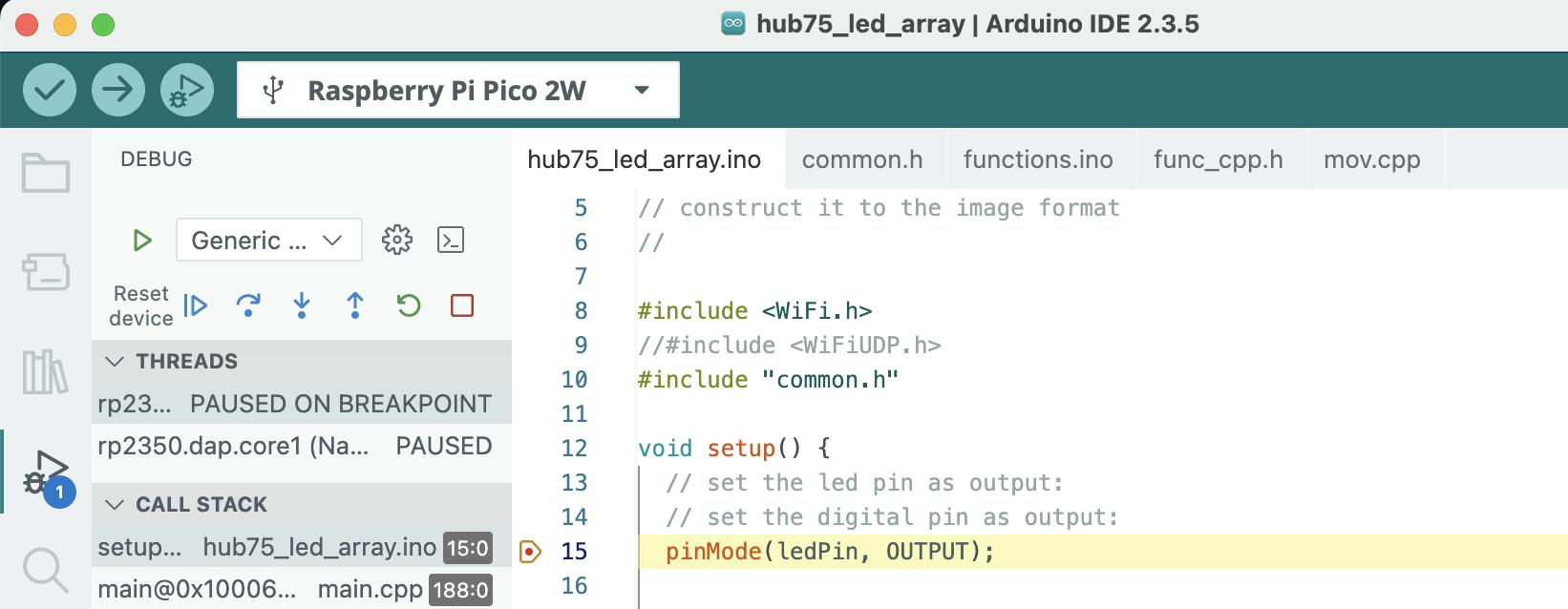
・コンパイラが最適化すると見れないローカル変数があるので、変数が見れるようにDebugモードにするようにCMakeで設定

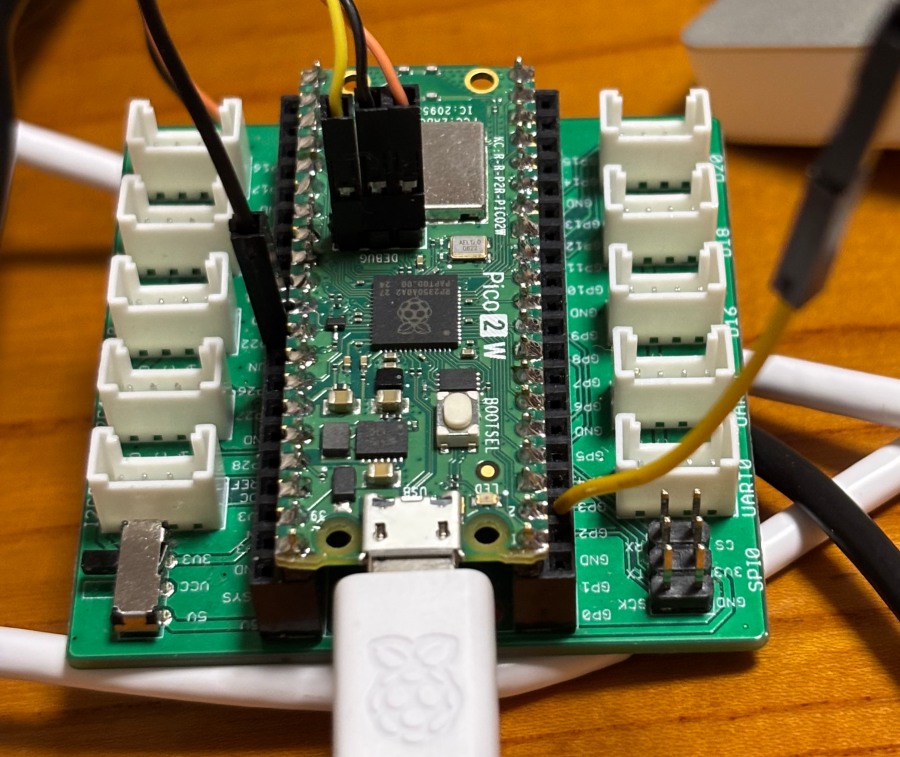
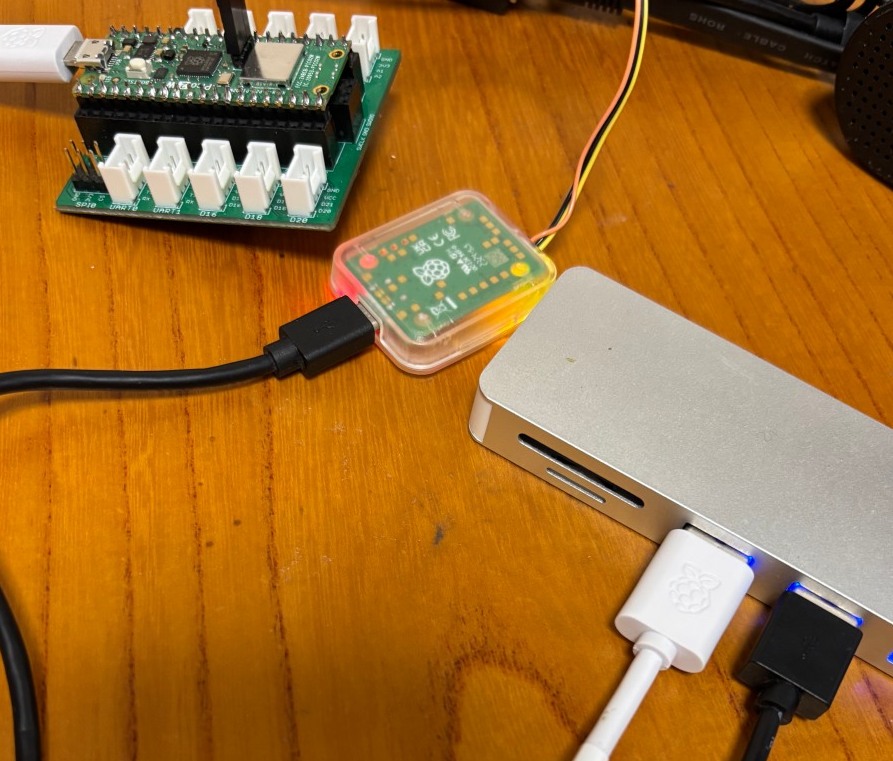
<接続>
こんな感じでGNDに落とす、
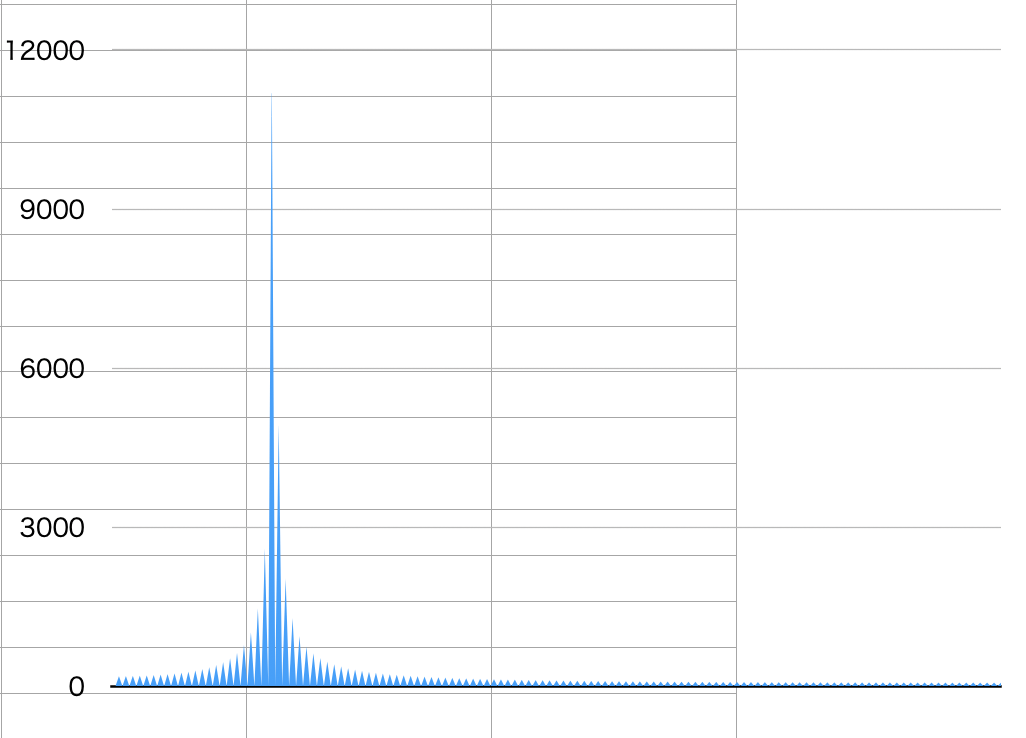
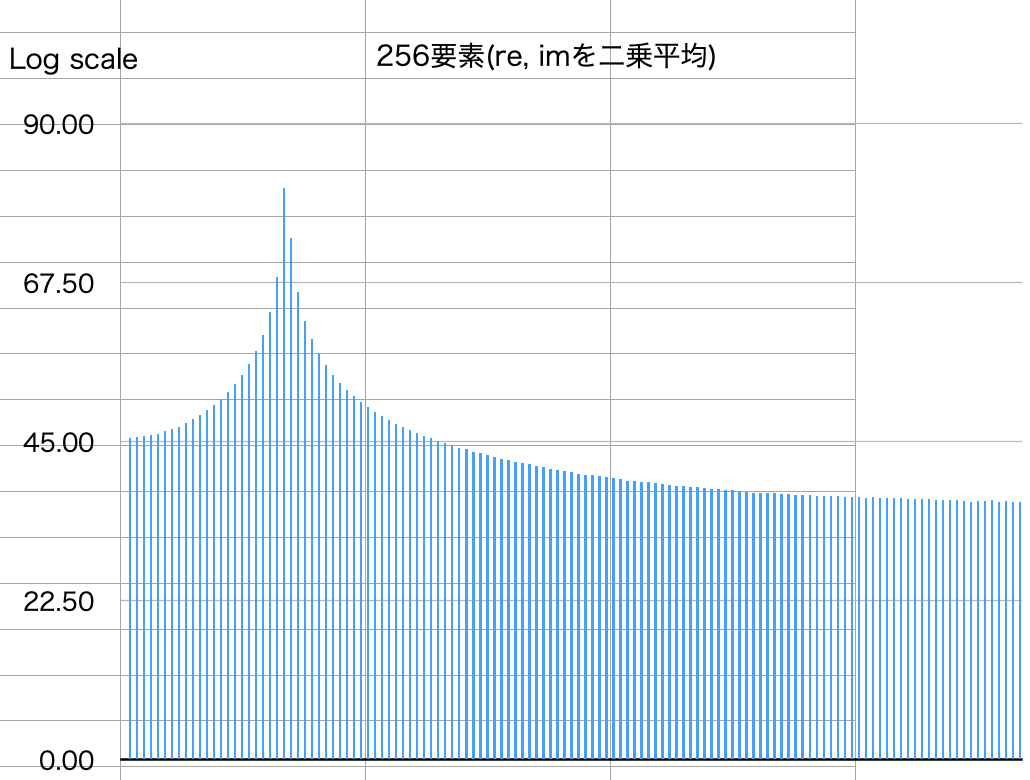
<結果>
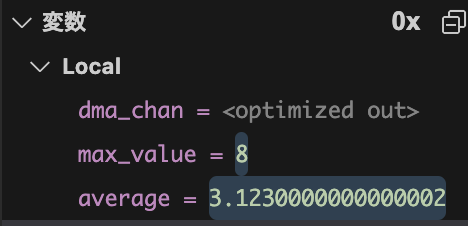
予想通り、LSB側の3ビットぐらいはノイズに埋もれてる
<全体のコード>
core1側で三角波作って外部のDACで波形作成して、ADCに入力することを想定しているね
DMA処理自体はレジスタ操作とかは不要で、pico-sdkに関数が用意されている
/**
* Copyright (c) 2021 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
//
// ADC values are 4bits shifted, so the max value is 255
//
// -> modify to handle full scale 12bits(2025/6/4)
// it seems noisy, LSB 3bits are inaccrate
//
#include <stdio.h>
#include "pico/stdlib.h"
// For ADC input:
#include "hardware/adc.h"
#include "hardware/dma.h"
// For resistor DAC output:
#include "pico/multicore.h"
#include "hardware/pio.h"
#include "resistor_dac.pio.h"
// This example uses the DMA to capture many samples from the ADC.
//
// - We are putting the ADC in free-running capture mode at 0.5 Msps
//
// - A DMA channel will be attached to the ADC sample FIFO
//
// - Configure the ADC to right-shift samples to 8 bits of significance, so we
// can DMA into a byte buffer
//
// This could be extended to use the ADC's round robin feature to sample two
// channels concurrently at 0.25 Msps each.
//
// It would be nice to have some analog samples to measure! This example also
// drives waves out through a 5-bit resistor DAC, as found on the reference
// VGA board. If you have that board, you can take an M-F jumper wire from
// GPIO 26 to the Green pin on the VGA connector (top row, next-but-rightmost
// hole). Or you can ignore that part of the code and connect your own signal
// to the ADC input.
// Channel 0 is GPIO26
#define CAPTURE_CHANNEL 0
#define CAPTURE_DEPTH 1000
uint16_t capture_buf[CAPTURE_DEPTH];
void calc_max_and_avg(const uint16_t *buf, size_t len, uint16_t *max_val, double *avg_val) {
uint16_t max = 0;
uint32_t sum = 0;
for (size_t i = 0; i < len; ++i) { if (buf[i] > max) max = buf[i];
sum += buf[i];
}
*max_val = max;
*avg_val = (double)sum / len;
}
void core1_main();
int main() {
stdio_init_all();
// Send core 1 off to start driving the "DAC" whilst we configure the ADC.
multicore_launch_core1(core1_main);
// Init GPIO for analogue use: hi-Z, no pulls, disable digital input buffer.
adc_gpio_init(26 + CAPTURE_CHANNEL);
adc_init();
adc_select_input(CAPTURE_CHANNEL);
adc_fifo_setup(
true, // Write each completed conversion to the sample FIFO
true, // Enable DMA data request (DREQ)
1, // DREQ (and IRQ) asserted when at least 1 sample present
false, // We won't see the ERR bit because of 8 bit reads; disable.
false // not Shift each sample to 8 bits when pushing to FIFO
);
// Divisor of 0 -> full speed. Free-running capture with the divider is
// equivalent to pressing the ADC_CS_START_ONCE button once per `div + 1`
// cycles (div not necessarily an integer). Each conversion takes 96
// cycles, so in general you want a divider of 0 (hold down the button
// continuously) or > 95 (take samples less frequently than 96 cycle
// intervals). This is all timed by the 48 MHz ADC clock.
adc_set_clkdiv(0);
printf("Arming DMA\n");
sleep_ms(1000);
// Set up the DMA to start transferring data as soon as it appears in FIFO
uint dma_chan = dma_claim_unused_channel(true);
dma_channel_config cfg = dma_channel_get_default_config(dma_chan);
// Reading from constant address, writing to incrementing byte addresses
channel_config_set_transfer_data_size(&cfg, DMA_SIZE_16);
channel_config_set_read_increment(&cfg, false);
channel_config_set_write_increment(&cfg, true);
// Pace transfers based on availability of ADC samples
channel_config_set_dreq(&cfg, DREQ_ADC);
dma_channel_configure(dma_chan, &cfg,
capture_buf, // dst
&adc_hw->fifo, // src
CAPTURE_DEPTH, // transfer count
true // start immediately
);
printf("Starting capture\n");
adc_run(true);
// Once DMA finishes, stop any new conversions from starting, and clean up
// the FIFO in case the ADC was still mid-conversion.
dma_channel_wait_for_finish_blocking(dma_chan);
printf("Capture finished\n");
adc_run(false);
adc_fifo_drain(); // max four samples
// Print samples to stdout so you can display them in pyplot, excel, matlab
for (int i = 0; i < CAPTURE_DEPTH; ++i) {
printf("%u, ", capture_buf[i]);
if (i % 10 == 9)
printf("\n");
}
uint16_t max_value;
double average;
calc_max_and_avg(capture_buf, CAPTURE_DEPTH, &max_value, &average);
printf("Max: %u\n", max_value);
printf("Average: %f\n", average);
}
// ----------------------------------------------------------------------------
// Code for driving the "DAC" output for us to measure
// Core 1 is just going to sit and drive samples out continuously. PIO provides
// consistent sample frequency.
#define OUTPUT_FREQ_KHZ 5
#define SAMPLE_WIDTH 5
// This is the green channel on the VGA board
#define DAC_PIN_BASE 6
void core1_main() {
PIO pio = pio0;
uint sm = pio_claim_unused_sm(pio0, true);
uint offset = pio_add_program(pio0, &resistor_dac_5bit_program);
resistor_dac_5bit_program_init(pio0, sm, offset,
OUTPUT_FREQ_KHZ * 1000 * 2 * (1 << SAMPLE_WIDTH), DAC_PIN_BASE);
while (true) {
// Triangle wave
for (int i = 0; i < (1 << SAMPLE_WIDTH); ++i)
pio_sm_put_blocking(pio, sm, i);
for (int i = 0; i < (1 << SAMPLE_WIDTH); ++i)
pio_sm_put_blocking(pio, sm, (1 << SAMPLE_WIDTH) - 1 - i);
}
}
admin









{kind=link}