ラズパイpicoを動かす環境には、
・Arduino IDE(Arduino言語)
・VScodeにPlatformIO(C言語)
gccを使うので、Arduino/M5StackのようなPlatformIOとの組み合わせでは無いですね。
https://qiita.com/n0bisuke/items/f4ff96bd74932c8def77
・Thonny(MicroPython)
が有力どころですが、以下を参考にThonny(4.1.2)、MacBook Airで動かしてみます。
https://krr910183393.wordpress.com/2021/02/15/raspberry-pi-pico-micropython-thonny-python-ide/
Thonnyのインストールは完了している前提で、
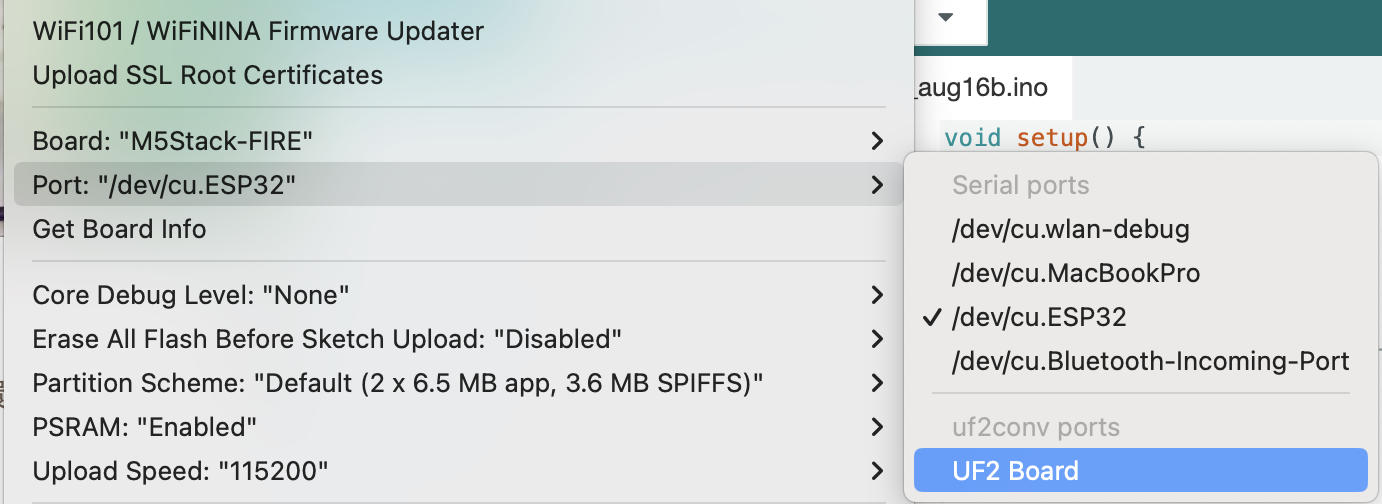
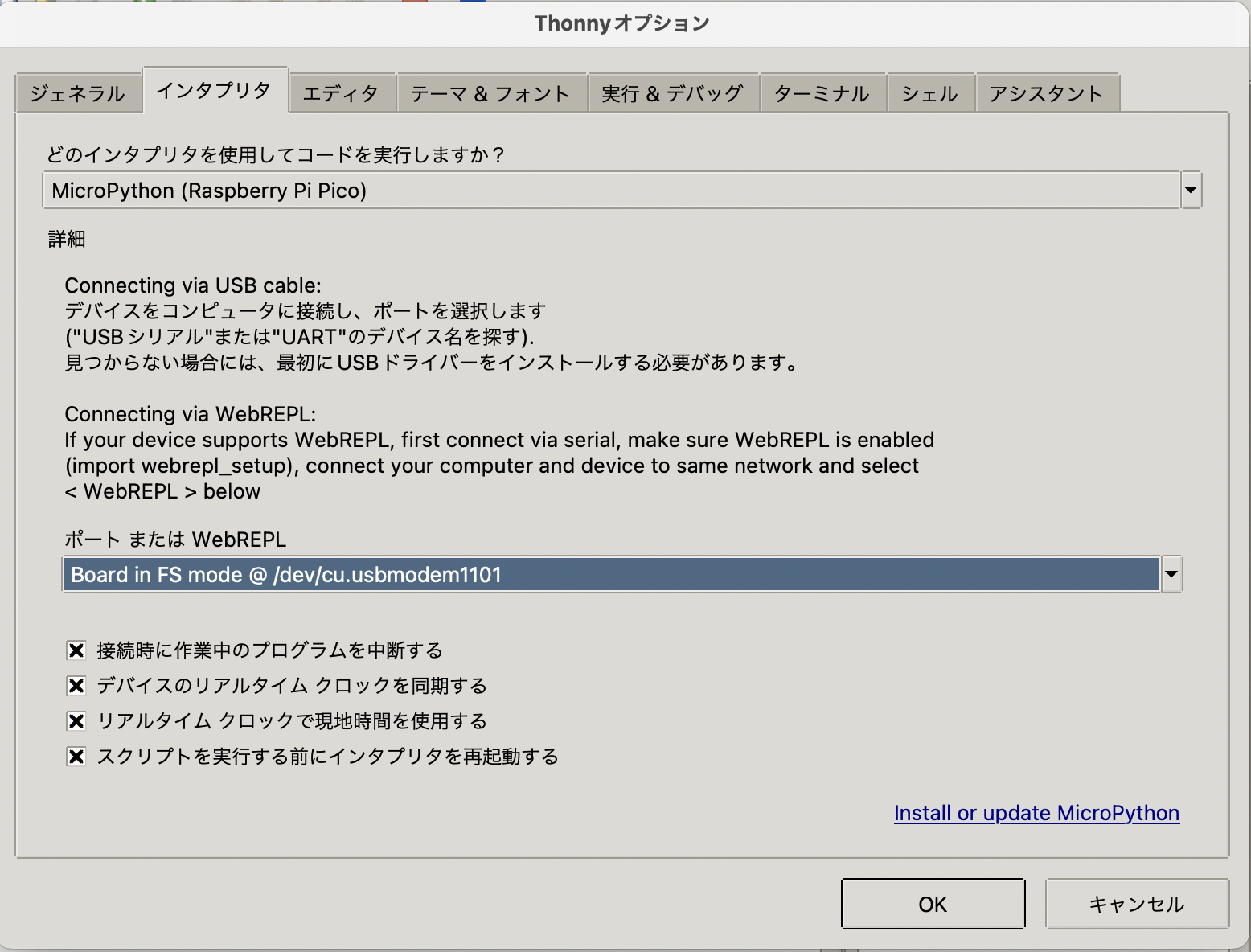
① シリアルポートを選択します
Thonnyの右下でインタプリタをインストールして、ファイルから切り離された状態で以下のように見えるはずなのでシリアルポートでラズパイpicoを選択する。シェル画面端のように接続状態になります。
Note : この時にはUSBシリアルで見えていなければならないので外部ファイルモードでは選択できません。Thonnyでは外部ファイルモードを使うのはMicroPythonのUF2ファイルを書き込むときだけです。
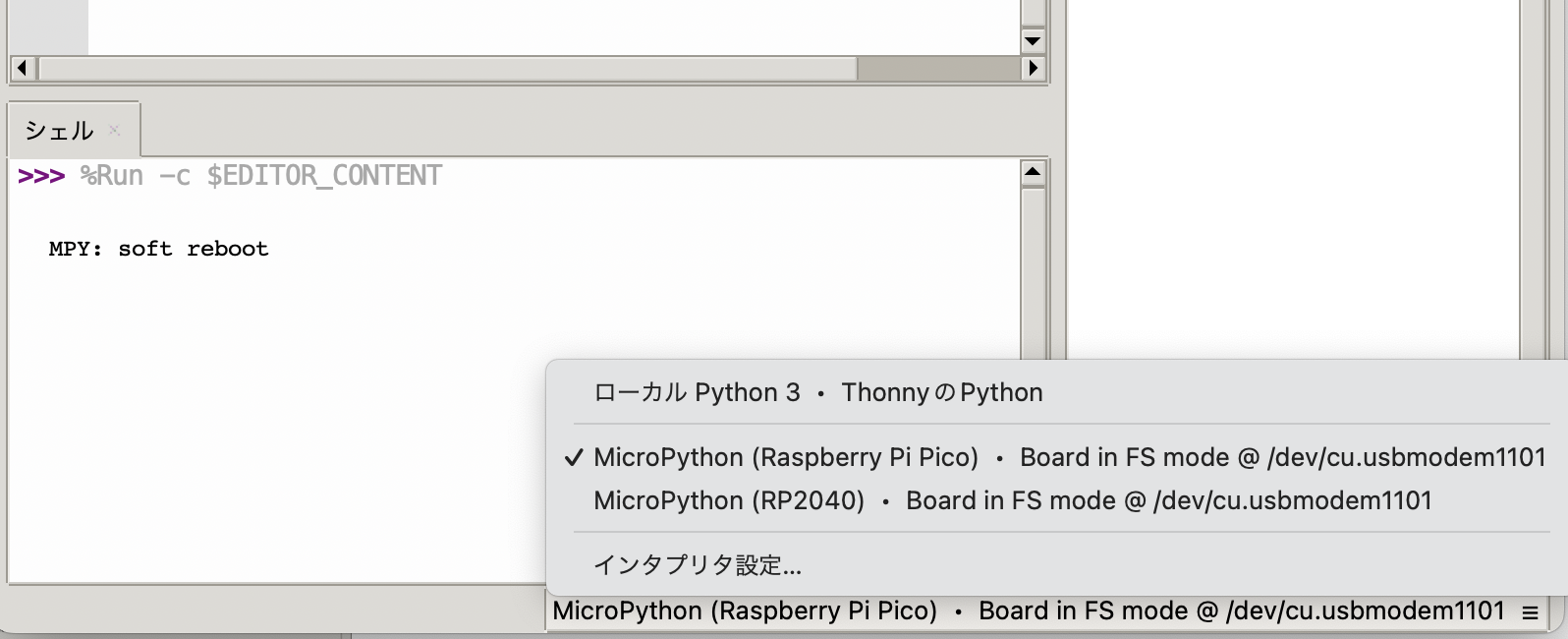
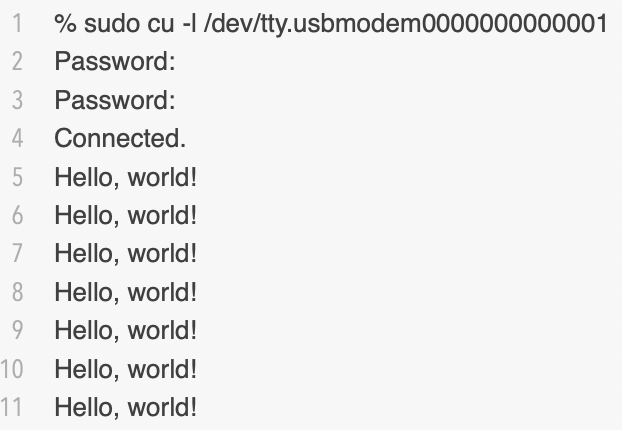
このように接続されています。
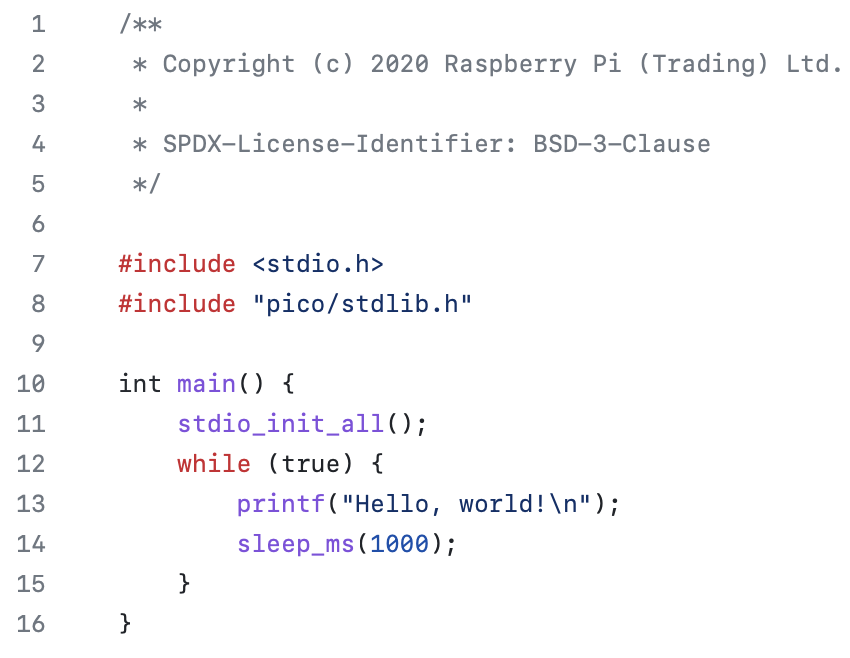
② サンプルコードを入力します(PICO本体搭載LEDの0.5秒毎ブリンク)
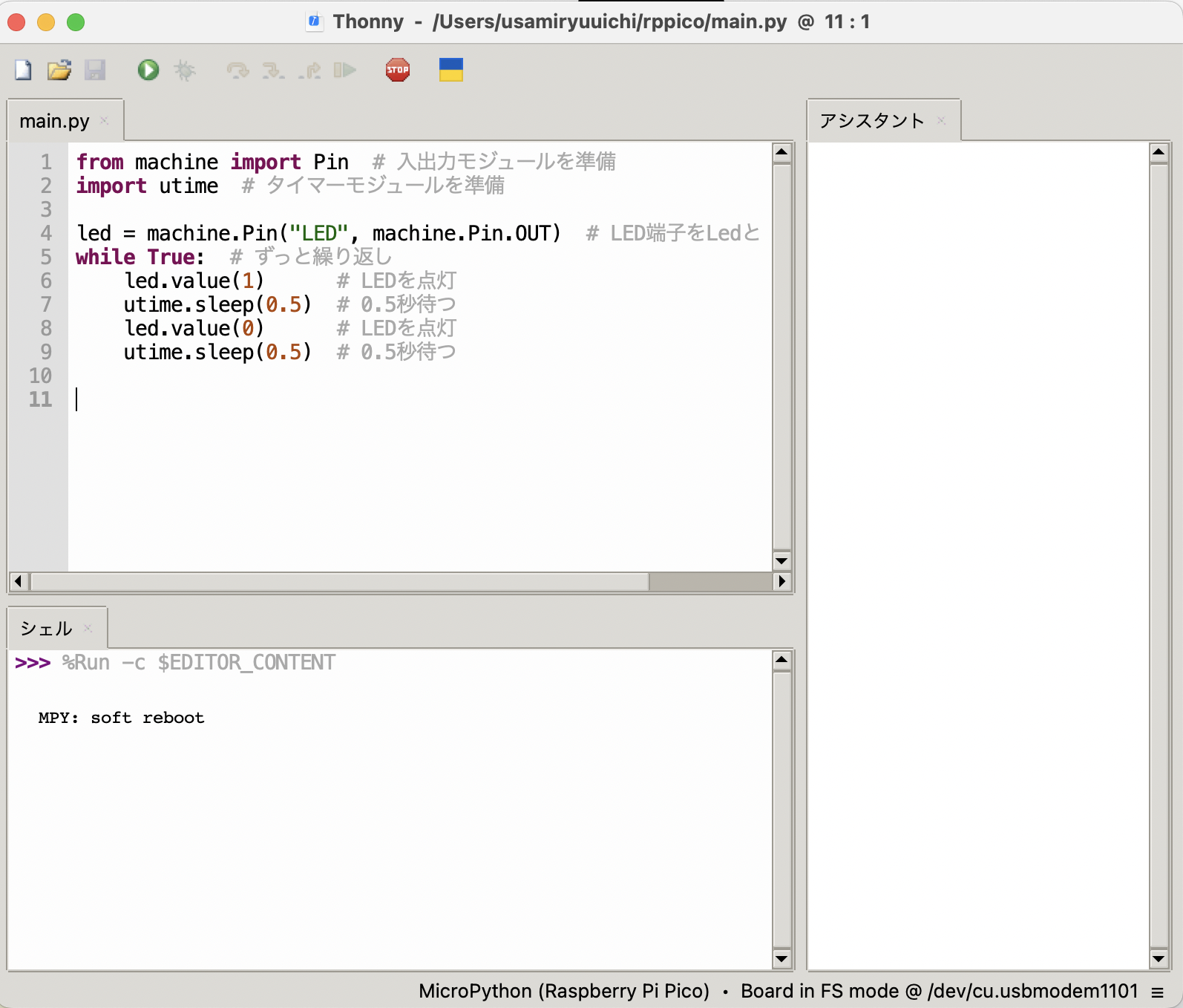
③ 緑矢印をクリックすると起動、停止させるには赤stopアイコンをクリック
ただしこの状態ではpicoにテンポラリーに保存されているだけのようなので、電源オンで自動起動させるためには次のステップが必要
④ 電源オンで自動起動させるには、『ファイル』『名前をつけて保存』でRaspberry Pi Picoにmain.pyの名前で保存すれば自動起動
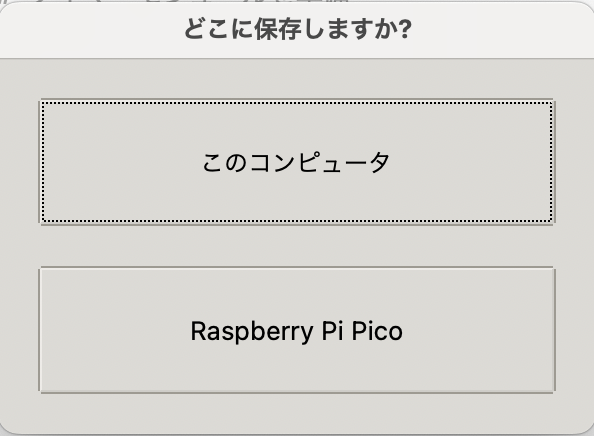
ただしパソコンのUSB経由でファイルに見えている状態では、そちらが優先されます。コードの書き換え考えたら妥当な仕様ですが。
P.S. (2023/9/5)
Thonny(MicroPython)の実行環境からArduino IDEを使ってしまうと、再度Thonnyを使うときには再度MicroPythonの実行環境をインストールしないといけません。
admin