https://isehara-3lv.sakura.ne.jp/blog/2023/04/19/golangアプリは単純にクロスビルドしても動かない(db/
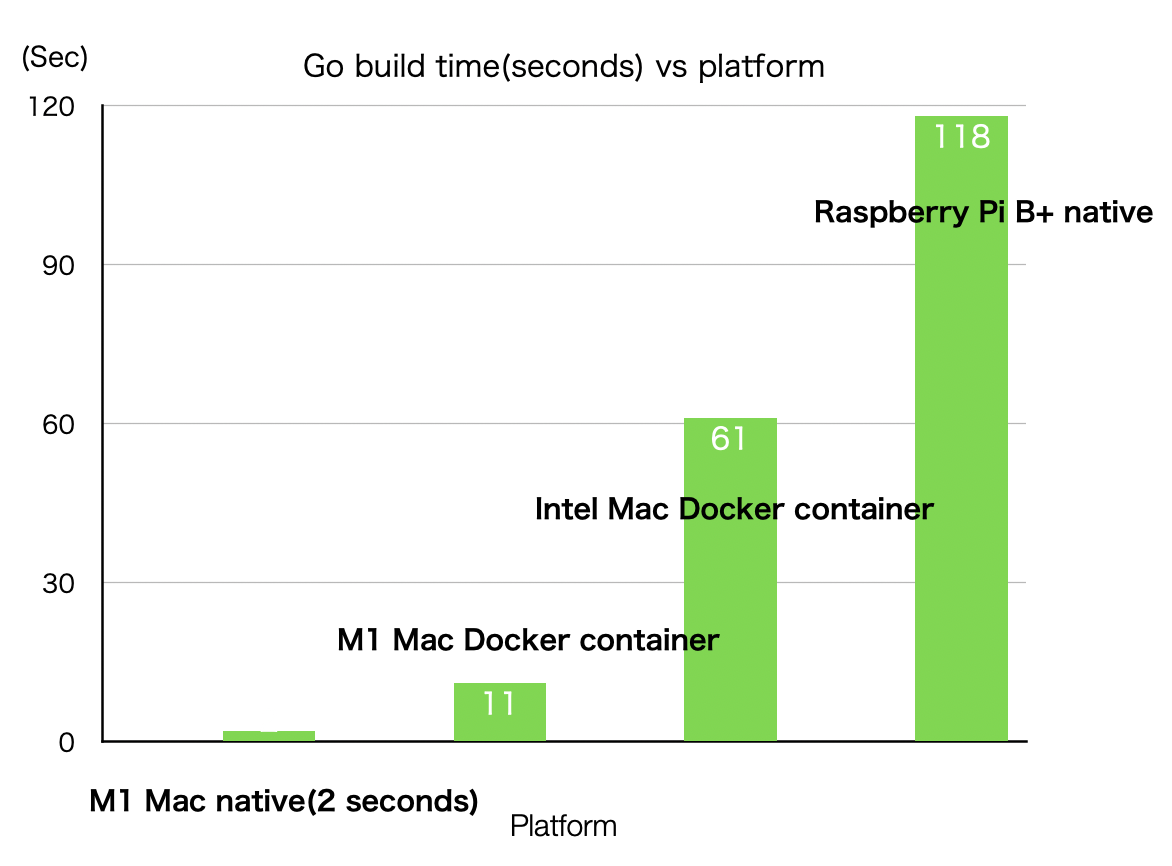
の対応としてとりあえずラズパイ自身でbuildさせましたが、ラズパイModel B+でbuildに必要な時間は、実行ファイルのタイムスタンプからおよそ二時間。これでは実用的ではないので代替え方法を考えるけれども、一番楽そうなのはDockerを使うことでしょう。
自分の環境を汚染させないとか、イメージの配布とかではなく、ラズパイの環境を作るための使用(DockerはM1 Macにインストール、ターゲットのコンテナはraspbian32 OS)です。
多少以前の記事になりますが、以下を参考に実行。raspbianイメージとかは最新版、と言っても2020年度が最新ですが。
https://www.koatech.info/blog/raspbian-on-docker/
・イメージ取得と作成
% wget http://ftp.jaist.ac.jp/pub/raspberrypi/raspios_lite_armhf/root.tar.xz
% docker image import ./root.tar.xz raspbian-stretch-lite:2020
・以下のコマンドでwarningが出る、とりあえずは無視して大丈夫な様子(QEMUは元々Intel CPU用だからか、Apple siliconでも今のところ何とかなってるけど)
% docker run --rm --privileged multiarch/qemu-user-static --reset -p yes
WARNING: The requested image's platform (linux/amd64) does not match the detected host platform (linux/arm64/v8) and no specific platform was requested
exec /register: exec format error
・コンテナ作成と起動(名前指定)
% docker run -it --name rasp32 raspbian-stretch-lite:2020 bash
・作成しているコンテナを起動するなら
% docker exec -it rasp32 bash
・Golang install
# wget https://golang.org/dl/go1.20.1.linux-armv6l.tar.gz
# sudo tar -C /usr/local -xzf go1.20.1.linux-armv6l.tar.gz
# /usr/local/go/bin/go version (パスが通っていない状態)
・Dockerのコンテナからファイルをクライアントにコピー(例)
% docker cp 21f2c6ce6eb8:/home/pi/hello .
・ディレクトリ指定すればその中全部をコピー(クライアントからコンテナへ)
% docker cp myfare 21f2c6ce6eb8:/home/pi/
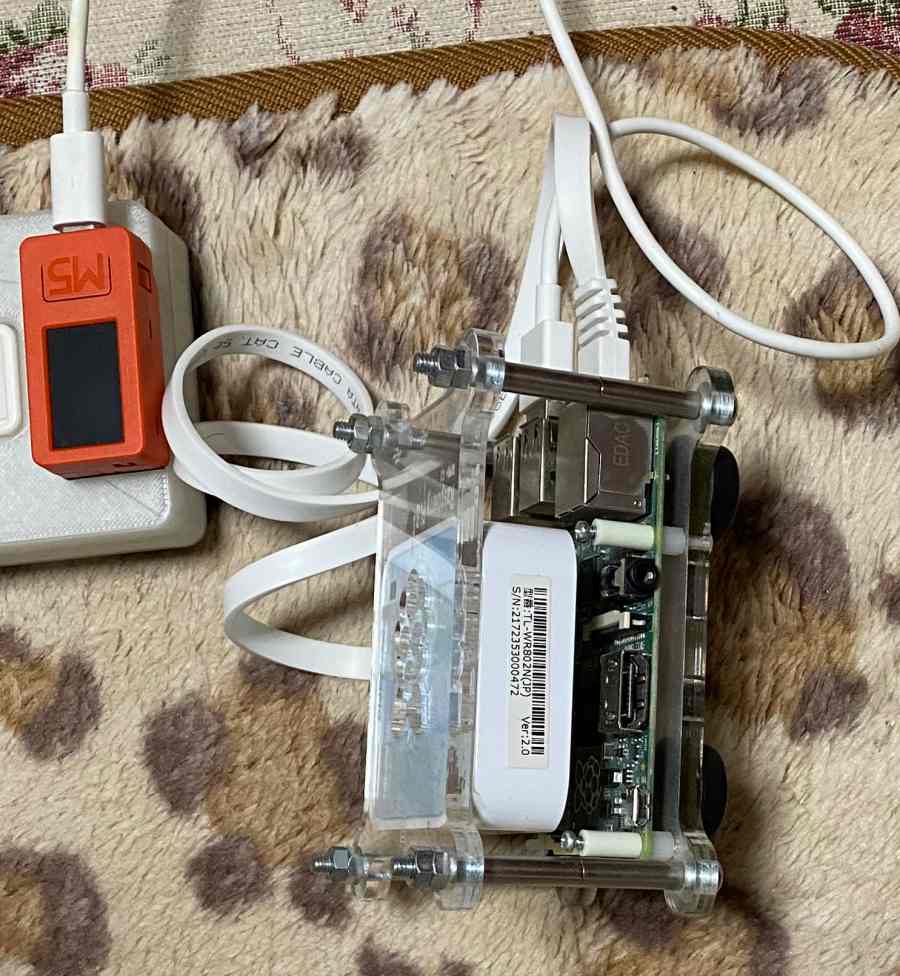
コンテナ上のMacの該当ディレクトリを丸ごとコピー(gomodなど含めて)してきてbuild、できた実行ファイルをscpでラズパイに転送して起動するとちゃんと実行できました。実行ファイルの動作確認、最初は定番のハローワールドで確認しています。
エミュレーション(QEMU)なので、速度はMacでbuildするのに比較すると遥かに遅い、それでも二分ぐらいで終わっているからやはりラズパイで実行するよりはほぼ百倍速いから実用的です。
実行ファイルのサイズが微妙に違うのはライブラリの版数違いか、main1のほうがコンテナでbuildしたもの。

コンテナ上のraspbian、

ラズパイのbuild環境としてはおそらくデフォルトだと思う。カスタマイズしたコンテナを作る時にDcokerfileを記述しておけば、再現性確保できます。
admin