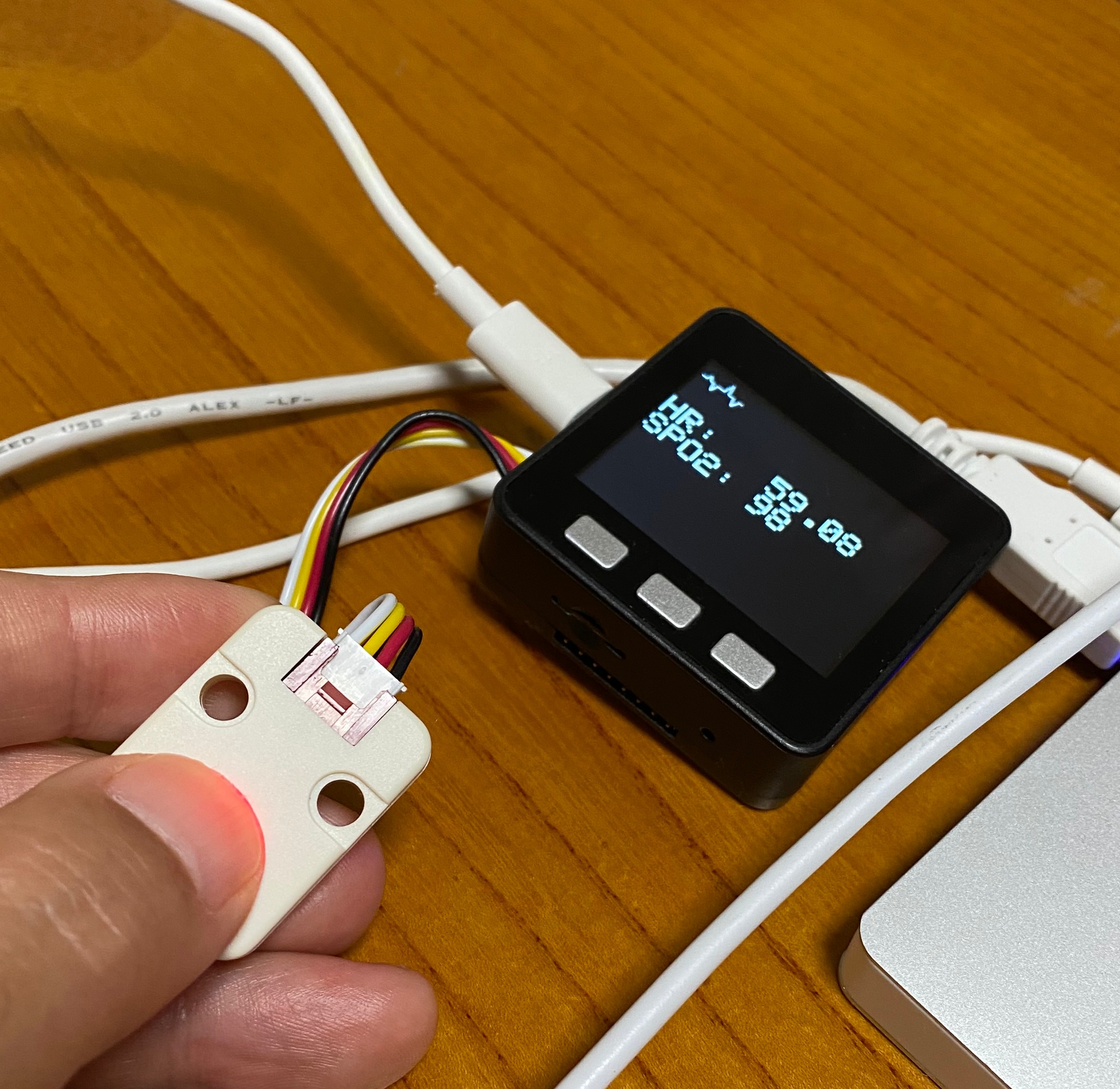
パルスオキシセンサーでバッテリー容量の表示をしようと思ってコードを追加しましたが、センサーの初期化処理が干渉しているようで値(初期化処理後は-1が帰る)が読み取れません。
void setup()
{
M5.begin();
M5.Power.begin();
Wire.begin(); // Wire init, adding the I2C bus.
Serial.begin(115200); // to PC via USB
M5.Lcd.clear(BLACK);
M5.Lcd.setTextSize(4);
// Initialize sensor
if (!pox.begin()) {
M5.Lcd.println("FAILED");
for(;;);
} else {
M5.Lcd.println("SUCCESS");
}
int bat_level = M5.Power.getBatteryLevel();
Serial.println(bat_level);loop()処理で読み取れないのでsetup()処理中に読み出しを埋め込むと// Initialize sensorの直後の(
pox.begin())から後ろでは-1が帰るようです。
なんだろう?
admin