ヒートシンクは必要そうなので、Amazonで購入したヒートシンク貼り付け。基盤はユニバーサルで、台(3Dプリンタ)作り直さなくて済むように取り付け穴を流用するので、対称形になっていません。
ヒートシンクの熱抵抗はそれほど低くなさそう(両面テープ貼り付け)なので、これはやってみるしか解らない。

回路図は前の記事と全く同じです。
admin

la vie libre
ヒートシンクは必要そうなので、Amazonで購入したヒートシンク貼り付け。基盤はユニバーサルで、台(3Dプリンタ)作り直さなくて済むように取り付け穴を流用するので、対称形になっていません。
ヒートシンクの熱抵抗はそれほど低くなさそう(両面テープ貼り付け)なので、これはやってみるしか解らない。
回路図は前の記事と全く同じです。
admin
FET到着したので、動かしてみた。makecodeのmiicro:bitのコードはPWM制御で以下のようなもの。周期とdutyは適宜変更しますが、

回路図はこんな感じで、ゲートの入力容量(800PFぐらいあります)の突入電流抑制の抵抗とゲート解放を避けるための抵抗の追加、モーターの逆起電力を逃すためのダイオードを追加しています。
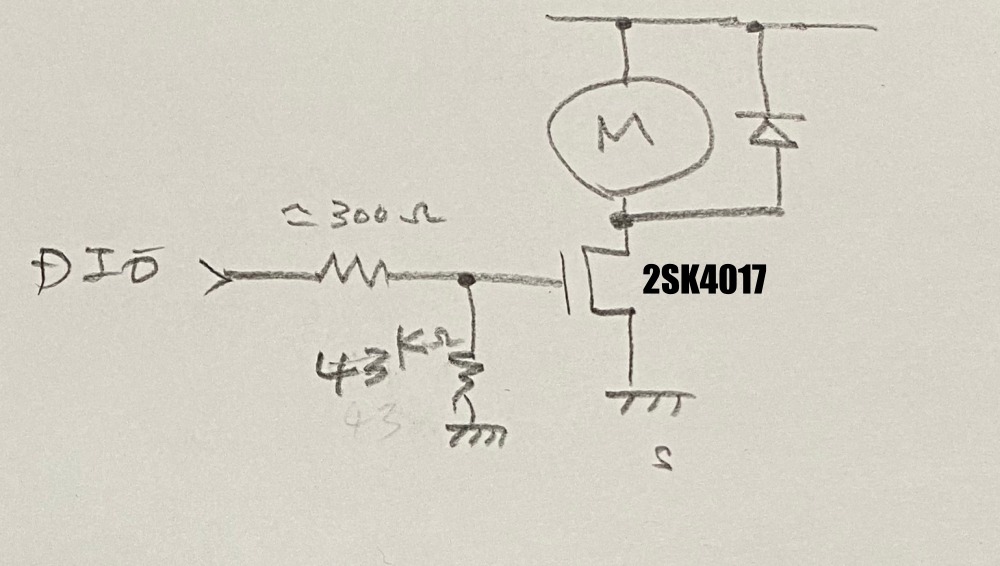
バラックで組み立て、

Duty100%だと放熱フィンが必要そうですが、前回の熱抵抗とオン抵抗の高い制御ICに比較すると大幅に改善されました。
今までの経緯を見てみると、Telloの電池が容量1,100mAhで継続時間13分ということはおよそ4C放電だから、モーターサイズはTelloとほぼ同じだから、モーター1個あたりおよそ1Aは流れる勘定。モーターの規格に書いてある0.15Aは全く根拠のない数字らしい。従って、制御系は最初の選択では全く能力不足。
P.S. ドローンの回転数上げると羽根が飛んでいくので対策(プロペラだけは売ってなさそう)考えないと。何回か抜き差しすると接合緩くなるのが原因。
admin
組んでみたけど、以下のリンクのレギュレーターでは電力が大きすぎて(?)制御しきれず、ICがチンチンとなってサーマルプロテクション掛かるのでまともに動かない。最初からこんなにコンパクトで、電力制御できるかという疑問はあったけれども、

https://isehara-3lv.sakura.ne.jp/blog/2023/11/23/パーツ(その2)-ホーバークラフト/
仕様からオン抵抗を抜き出すと、

ほぼ0.5Ωとかだと普通の電力用FETは10mΩ以下だから随分高い値だからロスも大きいということなんだろう。まして回転方向制御のために2個のFETが直列に入るからおよそ1Ωという大きな抵抗だからね。
回転方向の制御とかやらないから、シンプルにパワーFET一個でコントロールするやり方に変えよう。
admin
まずはきちんと浮かせることが出来るかどうかを検証しました。
空気室はホームセンターで調達の発泡丼、そこにモーターとプロペラ固定用のアダプタを3Dプリンタで造形して嵌め込み。

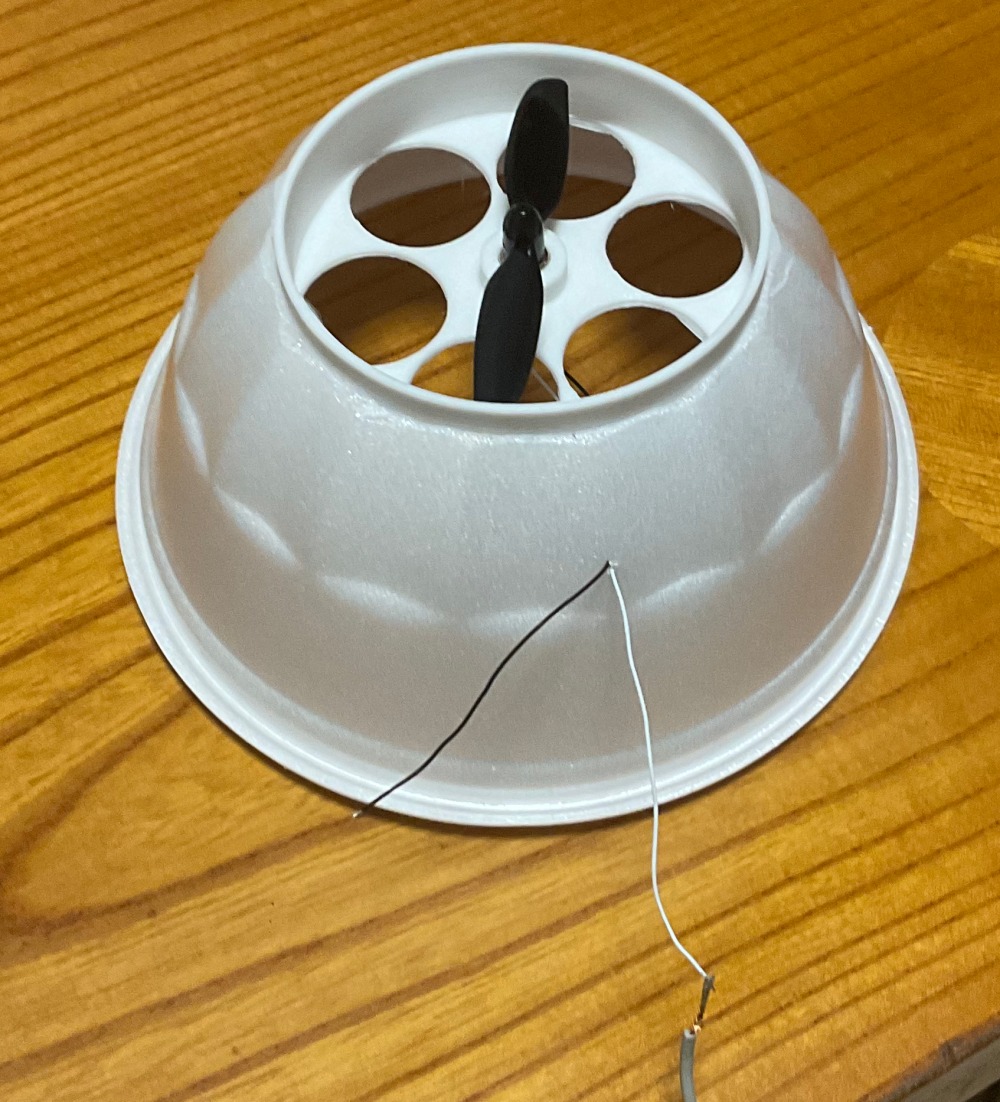
外部電源で4.8V(単三のNiH電池四直を想定)を与えると、元気に浮き上がりました。元気すぎてひっくり返りますが、
空気室への取り付け方と、全体(4個の空気室)の結合方法考えて、改善したものを4個と全体保持機構(これはアイディアこれから)を作ります。
admin
モーターの次は回転制御のためのレギュレーターですが、中国本土から出荷で到着予定日をかなり過ぎてから到着。
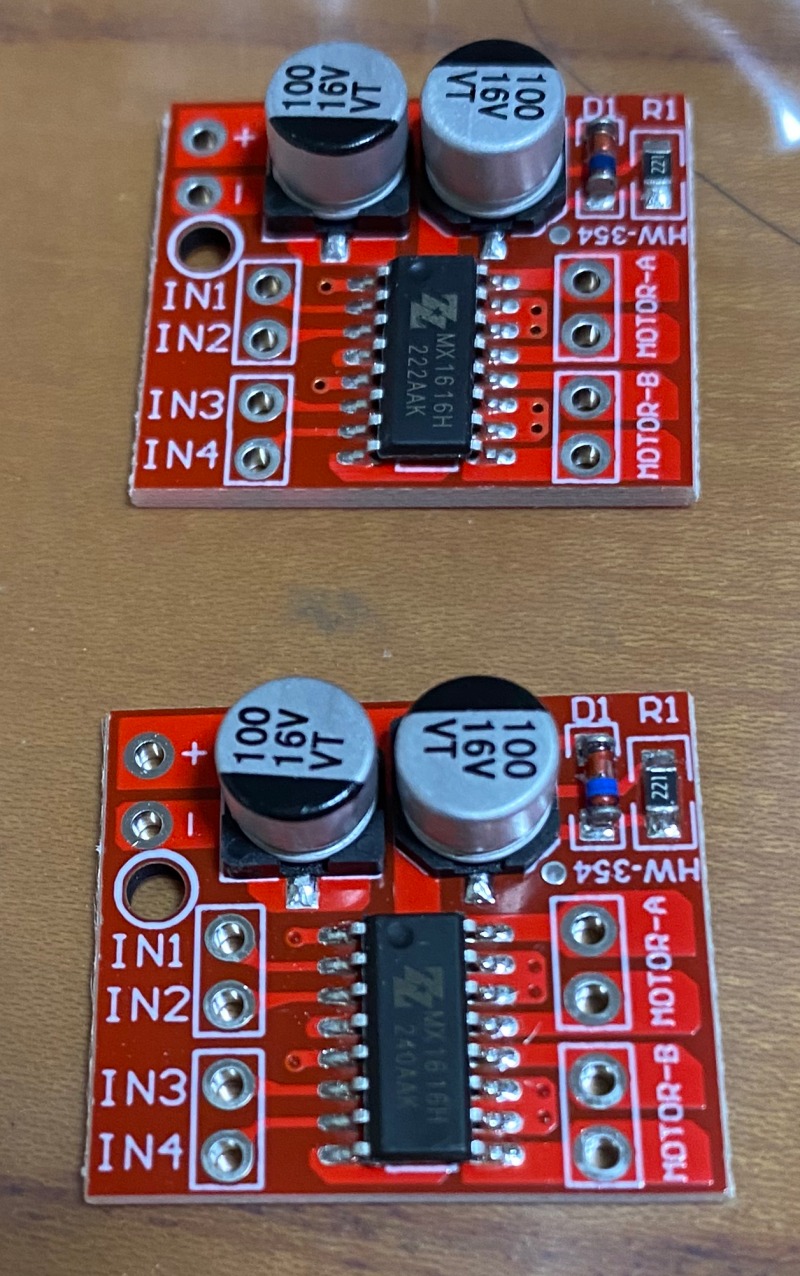
二個使いで、一個でモーター二個の制御ができます。
アプリケーションノートは、
https://logikara.blog/raspi-pico-dcmotor/
あたりが接続の参考になりそうです。
admin
micro:bitで制御するホーバークラフト用のパーツとして、まずドローン用のモーターとプロペラを購入。
https://www.amazon.co.jp/gp/product/B078GM6PRN/ref=ppx_yo_dt_b_asin_title_o01_s00?ie=UTF8&psc=1
ブラシモーターですが、まあ寿命とか気にするわけではないので。
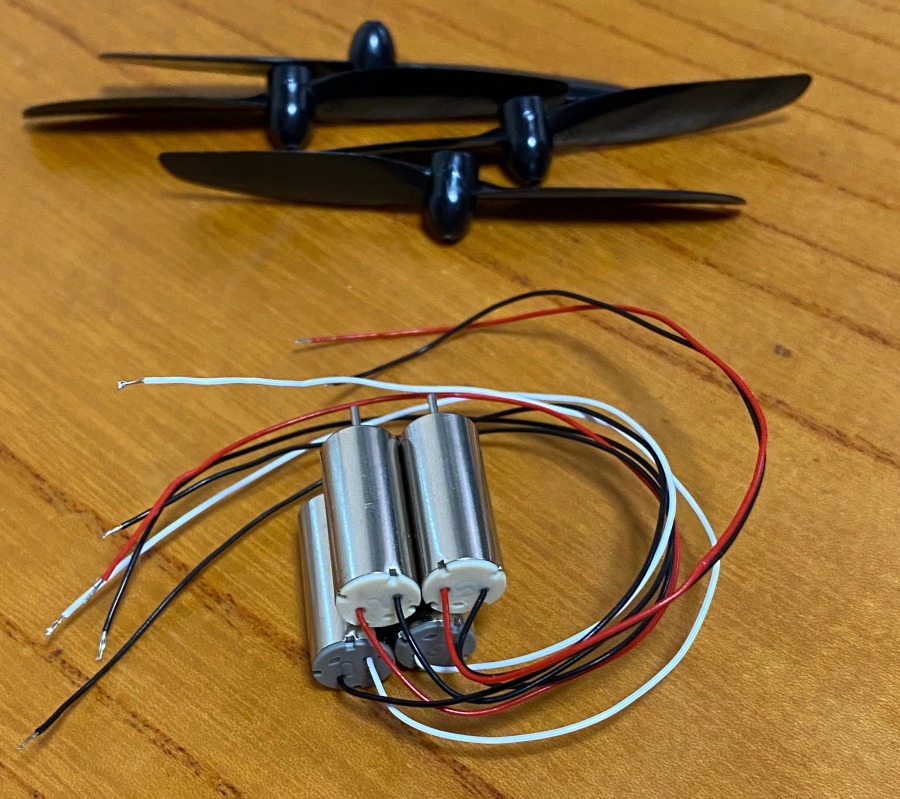
cwとccwの識別は配線の色、もしくはキャップ部分の色で識別可能です。
PWM制御用のレギュレーターは中国本国から出荷のようで来週になるでしょう。
https://www.amazon.co.jp/gp/product/B07P2TL2SF/ref=ppx_yo_dt_b_asin_title_o00_s00?ie=UTF8&psc=1
見たところ、パワー系の部品が見当たらないので、これでPWM制御で使えるのかと思いますが、事例を見る限りは問題なさそうです。
admin
Maker Faireで見た人が乗れるホーバークラフトですが、
ドローンに比較すると相対的には少ないエネルギーで浮上できるし、落下の危険性もないから安全だと思うのでmicro:bit使って制御する模型を作ろうかと思っていますが、進行制御はどうするのか?
シンプルに考えれば、ファンを4個持つドローンのような制御方法を考えれば、反転方向の回転速度を落とせば時計方向、半時計方向のターンができるし、片側2個の回転速度を上げれば反対方向に進むように思うけれどもこれでうまくいくのか。
まあ、やってみるしかないからドローン用のモーターを買ってみようと思う。
電池はLi-ionでなくともNiMH使っても重量増加は、これも問題ないように思う。
admin