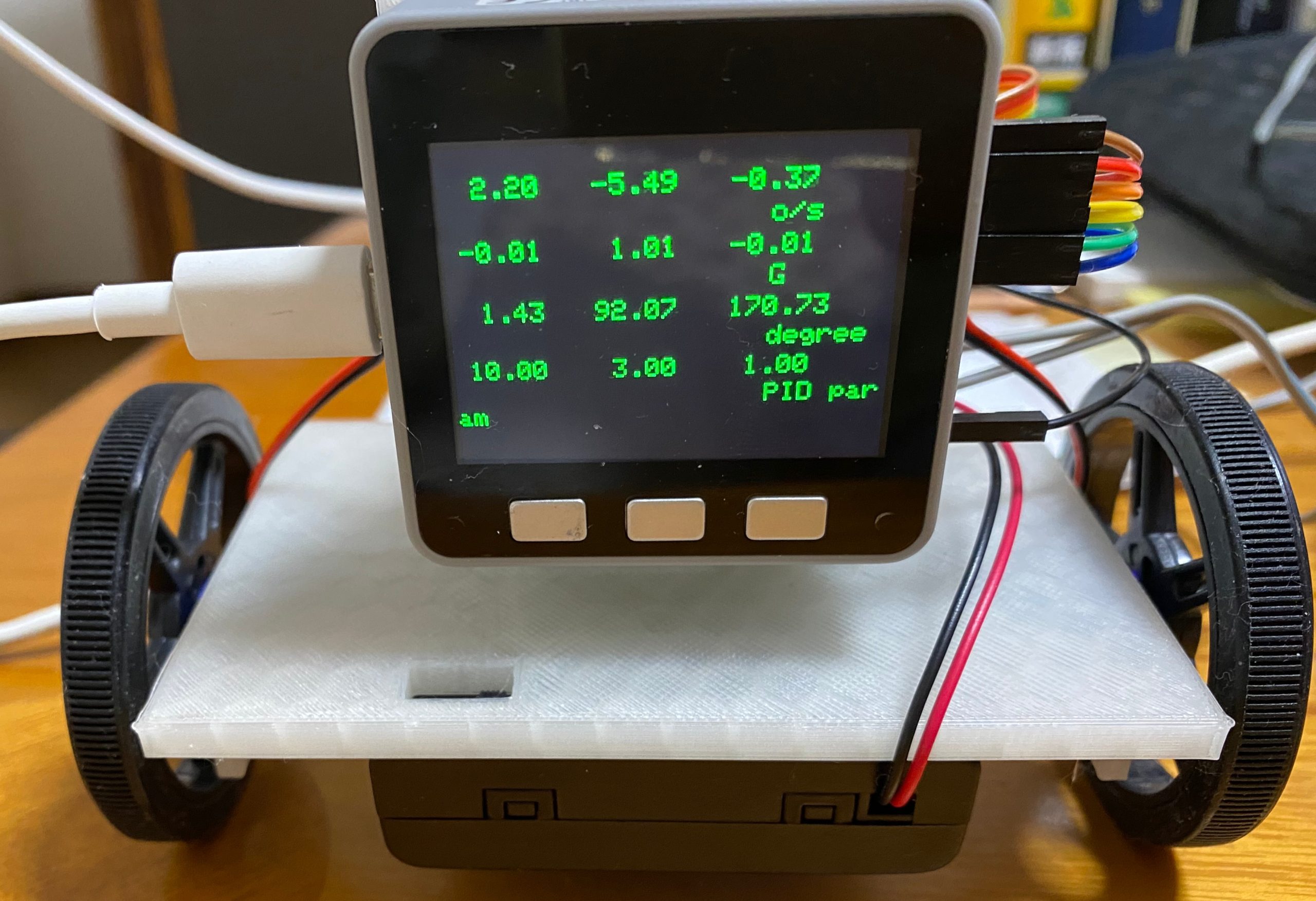
倒立振子の製作を始めてますが、PID制御のパラメータ設定を簡単に行えるような準備も整ったのであとはコード全体を書いて調整に取り掛かるだけ。

PIDパラメータは調整のおおまかな方針は決まっているようですが、最後の微調整はカットアンドトライになるので、いちいちソースコンパイル、ダウンロードでは効率が悪いので、ダイナミック(on the fly)でパラメータ書き換えの手段が必須になります。
やり方はM5Stack側はUDP受信で、送信側はProcessingを使って更新します。
<Processingのコード>
/*
set PID parametor to the m5stack using UDP
*/
import hypermedia.net.*;
import controlP5.*;
UDP udp;
ControlP5 cp5;
final String IP = "192.168.1.15";
final int PORT = 3002;
String msg = "10, 3, 1"; // P, I, D
void setup() {
size(200, 200);
cp5 = new ControlP5(this);
udp = new UDP( this, 3002 );
ControlFont cf = new ControlFont(createFont("Serif",20));
cp5.addButton("UDP_Msg")
.setFont(cf)
.setLabel("send")
.setPosition(50,50)
.setSize(100,100);
}
void draw() {
background(200);
}
void UDP_Msg(){
udp.send(msg, IP, PORT);
}
SENDボタンでUDP送信、パラメータの書き換えはソースコードで行いますがコンパイル時間は見えないので、実質瞬時に対応できます。

<M5StackのUDP受信処理抜き出し>
M5StackのRegExp処理はいまいちよく分からなかったので、受信テキストは文字列分割で対応。カンマ区切りの3個のパラメータだけなので文字分割でも対応できますが、その分コードは美しくない。このコードをloop()処理中に記述して、ダイナミックにPIDパラメータ変更を実現します。
UDP通信とパラメータ格納の該当部分だけ抜き出したコードです。
#define N 1024
// PID variables
float P_val = 50;
float I_val = 2;
float D_val = 10;
WiFiUDP udp;
char packetBuffer[N];
int packetSize = udp.parsePacket();
if (packetSize){
int len = udp.read(packetBuffer, packetSize);
String pid_data = String(packetBuffer);
//Serial.println(pid_data);
int index = pid_data.indexOf(",");
P_val = (pid_data.substring(0, index)).toFloat(); // P
pid_data = pid_data.substring(index + 1, pid_data.length());
index = pid_data.indexOf(",");
I_val = (pid_data.substring(0, index)).toFloat(); // I
pid_data = pid_data.substring(index + 1, pid_data.length());
D_val = pid_data.toFloat(); // D
admin