
同じWi-Fiエリアで例えばラズパイと通信しようとすると固定IPは使わないだろうからアドレス解決にmDNSを使う必要があります。ラズパイ側はavahiでmDNSがデフォルトで使えるようになってますね。
参考サイトは、
https://shuzo-kino.hateblo.jp/entry/2021/02/22/230207
・公式ドキュメント
https://espressif.github.io/esp-protocols/mdns/en/index.html
を参考に、動かしてみました。
mDNSをサポートするライブラリは”espmdns.h”になります。
#include <m5stack.h>
#include <wifi.h>
#include <wificlient.h>
#include <webserver.h>
#include <espmdns.h>
const char* ssid = "said"; // set your said
const char* password = "pw"; // set your pw
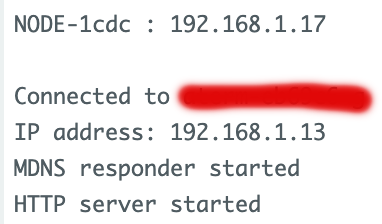
String target_dev = "NODE-1cdc";
WebServer server(80);
void handleRoot() {
server.send(200, "text/plain", "hello from M5stack server using mDNS!");
}
void handleNotFound() {
String message = "File Not Found\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET) ? "GET" : "POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
for (uint8_t i = 0; i < server.args(); i++) {
message += " " + server.argName(i) + ": " + server.arg(i) + "\n";
}
server.send(404, "text/plain", message);
}
void setup(void) {
M5.begin(true, false, true);
M5.Power.begin(); // Init power
M5.lcd.setTextSize(2); // Set the text size to 2.
M5.Lcd.setTextColor(WHITE); // set font color to white
M5.lcd.fillScreen(BLACK);
delay(500);
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
Serial.println("");
// Wait for connection
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
M5.lcd.setCursor(50, 110);
M5.Lcd.print("connected to Wi-Fi");
mdns_init();
IPAddress ip = MDNS.queryHost(target_dev);
Serial.println("");
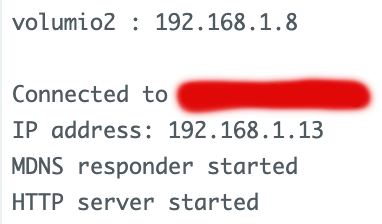
Serial.print(target_dev + " : ");
Serial.println(ip);
Serial.println("");
Serial.print("Connected to ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
if (MDNS.begin("m5stack")) {
Serial.println("MDNS responder started");
}
server.on("/", handleRoot);
server.on("/inline", []() {
server.send(200, "text/plain", "this works as well");
});
server.onNotFound(handleNotFound);
server.begin();
Serial.println("HTTP server started");
}
void loop(void) {
server.handleClient();
}・HTTPサーバーとしてのmDNS機能の確認
M5stackにHTTPサーバー機能を持たせてそのアドレス検索にmDNSを使っています。
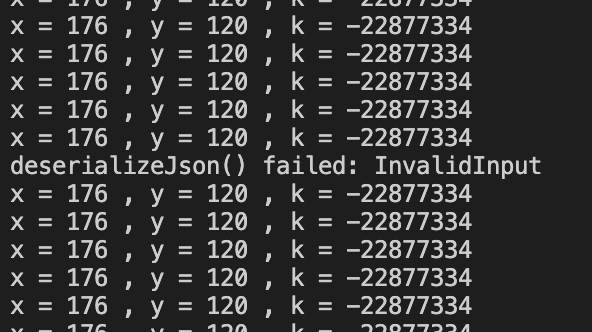
・ネットワーク内のmDNSデバイスのIPアドレス検索
53行目から57行目がそのコードになります。
・M5stackにはWi-Fi接続完了時にメッセージ出しています

admin








{kind=link}