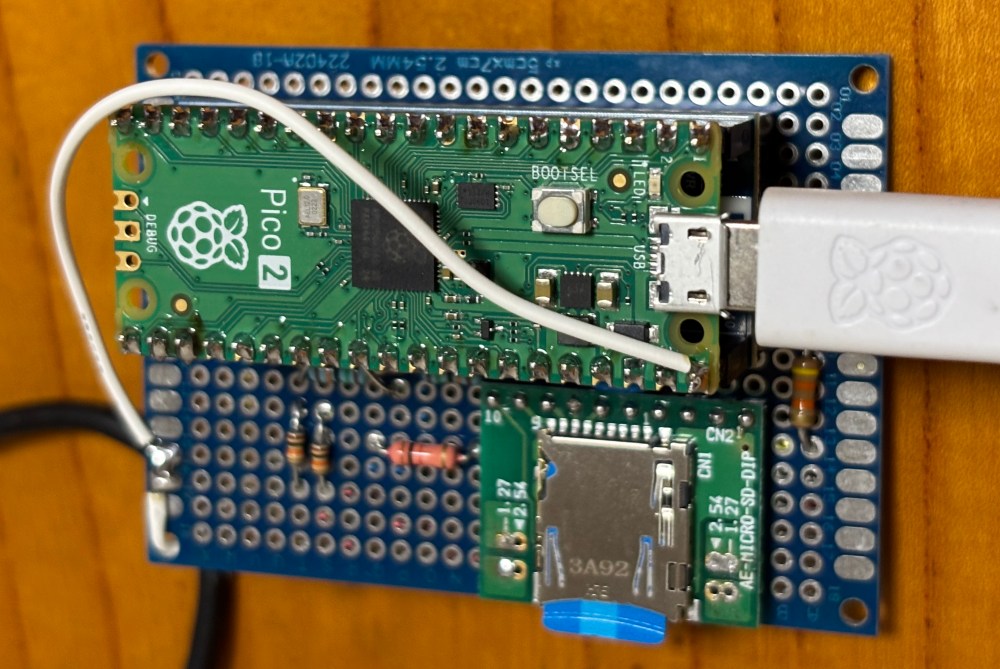
次の要素はSPIバスにつながるSDカードへのアクセスです
<microPythonのSDカードアクセスライブラリと動作確認>
https://github.com/micropython/micropython-lib/tree/master/micropython
ここから持ってきました、
ライブラリの転送はVScodeでは面倒ぽいので、Thonnyを使って転送、ライブラリは一度ピコに書き込めばVScodeでもそのまま有効です、ただしVScodeですでにUSBシリアル使ってるとThonnyは接続できないから、VScode側は終了しないと競合してしまいます、逆も真也
実行時のVScodeのコンソール出力、上段はmicroSD未挿入だからエラーが出る、カードがラズパイ用のSDカードシステムなので。それらしきファイルが見えます、ファイル形式はおそらくFAT32しか扱えないと思う
———————————————————
MicroPython v1.26.0 on 2025-08-09; Raspberry Pi Pico2 with RP2350
Type "help()" for more information or .help for custom vREPL commands.
>>>
Traceback (most recent call last):
File "", line 7, in
File "sdcard.py", line 54, in __init__
File "sdcard.py", line 82, in init_card
OSError: no SD card
>>>
2025/09/12 17:18:00 Friday
alarm1 time is up
———————————————————
os.listdir(‘/sd’) の結果を格納して出力(以下のコード)すると、
files = os.listdir('/sd') # set to mount point
for file in files:
print(file)
>>>
overlays
bcm2708-rpi-b-plus.dtb
LICENCE.broadcom
issue.txt
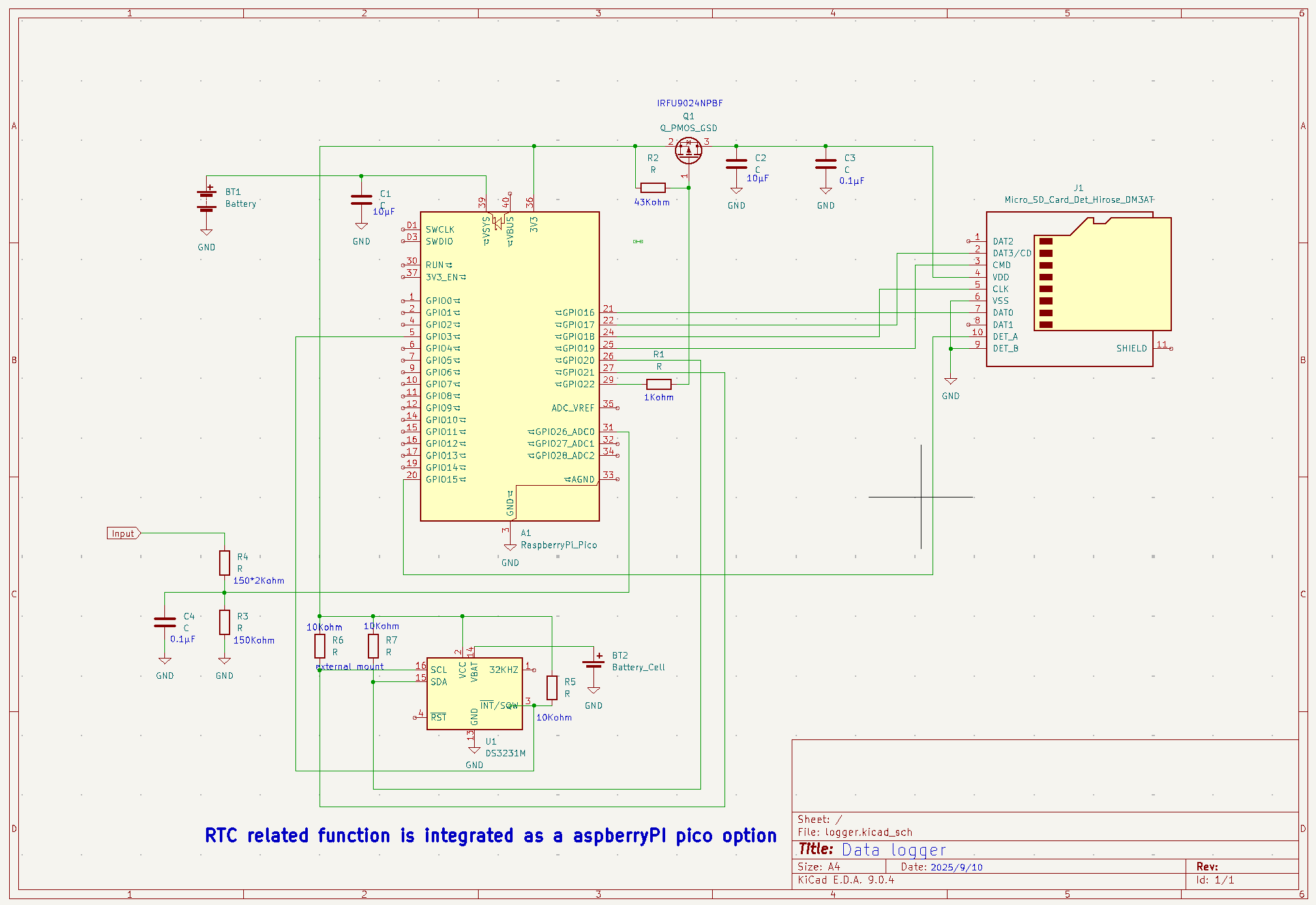
~~~ 以下省略(ラズパイのシステムディスクだからこんな中身) 一応カード検出機能もGPIOに入れてるけど、SDカードにアクセスできなきゃこうなる、実際の運用ではカード検出できなかったら例えばLEDを高速点滅とかの手段だろうね
<タイマー割り込み設定>
タイマーIC(DS3231)のタイマー割り込み設定は絶対時間指定しかできないから、西暦以降全ての指定が必要、ただしタイマーICはデータ形式がBCD(Binary Code Decimal)、例えば十進21は15hではなく21hのような形式だから、内部で都度変換処理が必要、全部生成AIでコード作成したけどね
仮にUSB電源電圧を1分ごとにログするようにしてみた結果はこんな感じ、絶対時間で指定だから、相対時間指定のように段々処理時間が加算されて時間がずれていくようなことはない
Alarm time 1 min later: 20:28:31,Sunday,2025-09-14
5.09
Alarm time 1 min later: 20:29:31,Sunday,2025-09-14
5.09
Alarm time 1 min later: 20:30:31,Sunday,2025-09-14
5.1
Alarm time 1 min later: 20:31:31,Sunday,2025-09-14
5.09
Alarm time 1 min later: 20:32:31,Sunday,2025-09-14
5.1
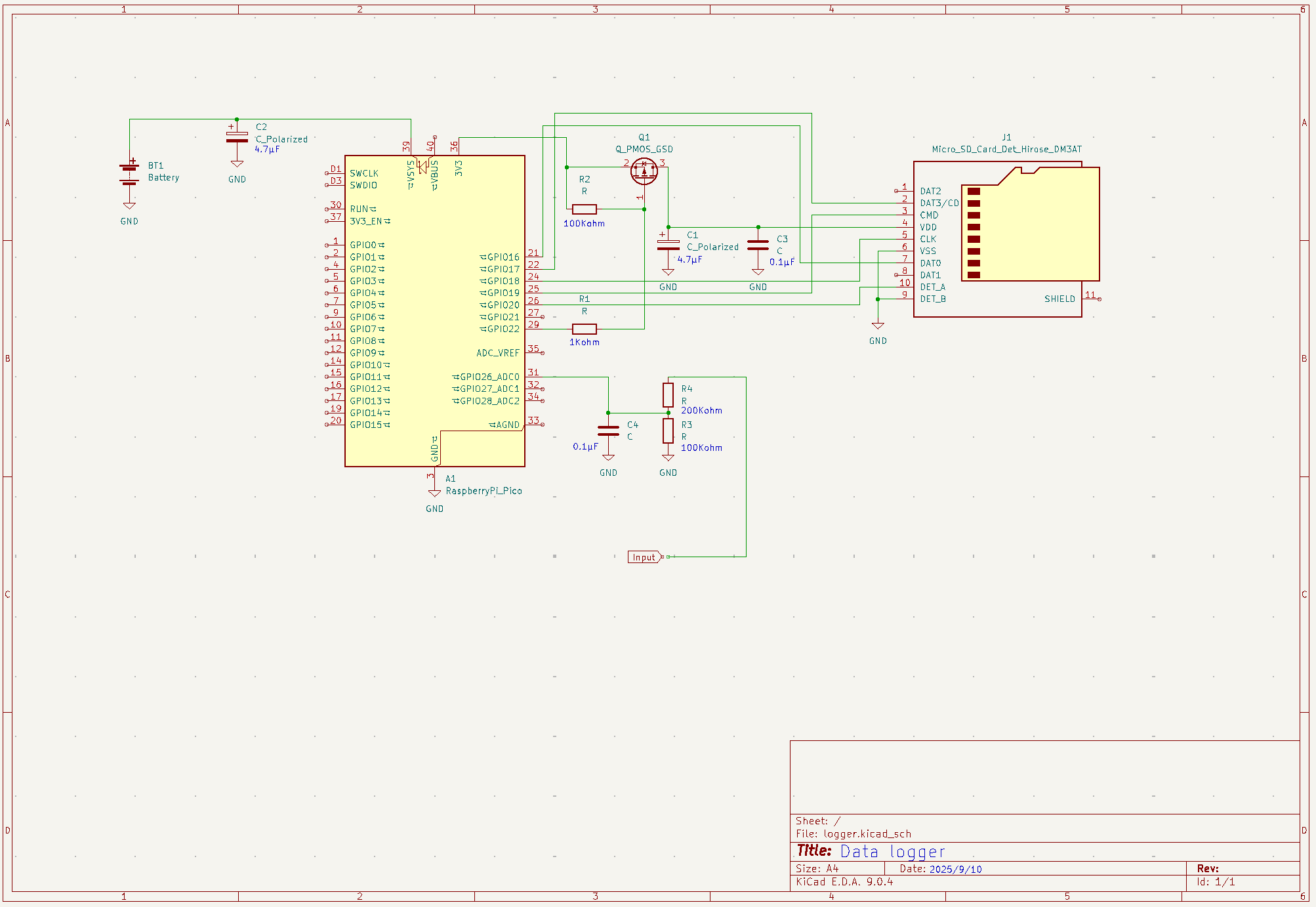
<ファイルへの書き込み>
アナログ的に入力電圧を抵抗分割で1/3しているからリアルの電圧に換算してSDカードに書き込み、書き込みデータの最後の方はこんな風になってます
5.09
5.1
5.09
5.1
5.09
5.1
5.07次は電源制御だね、広義にはmicroPythonでどこまで省電力動作できるかどうかということ
<今現在のコード>
おそらく冗長になってると思う、
#!/usr/bin/python
# -*- coding: utf-8 -*-
from machine import Pin, I2C, ADC
import time
import binascii
import machine, sdcard, os
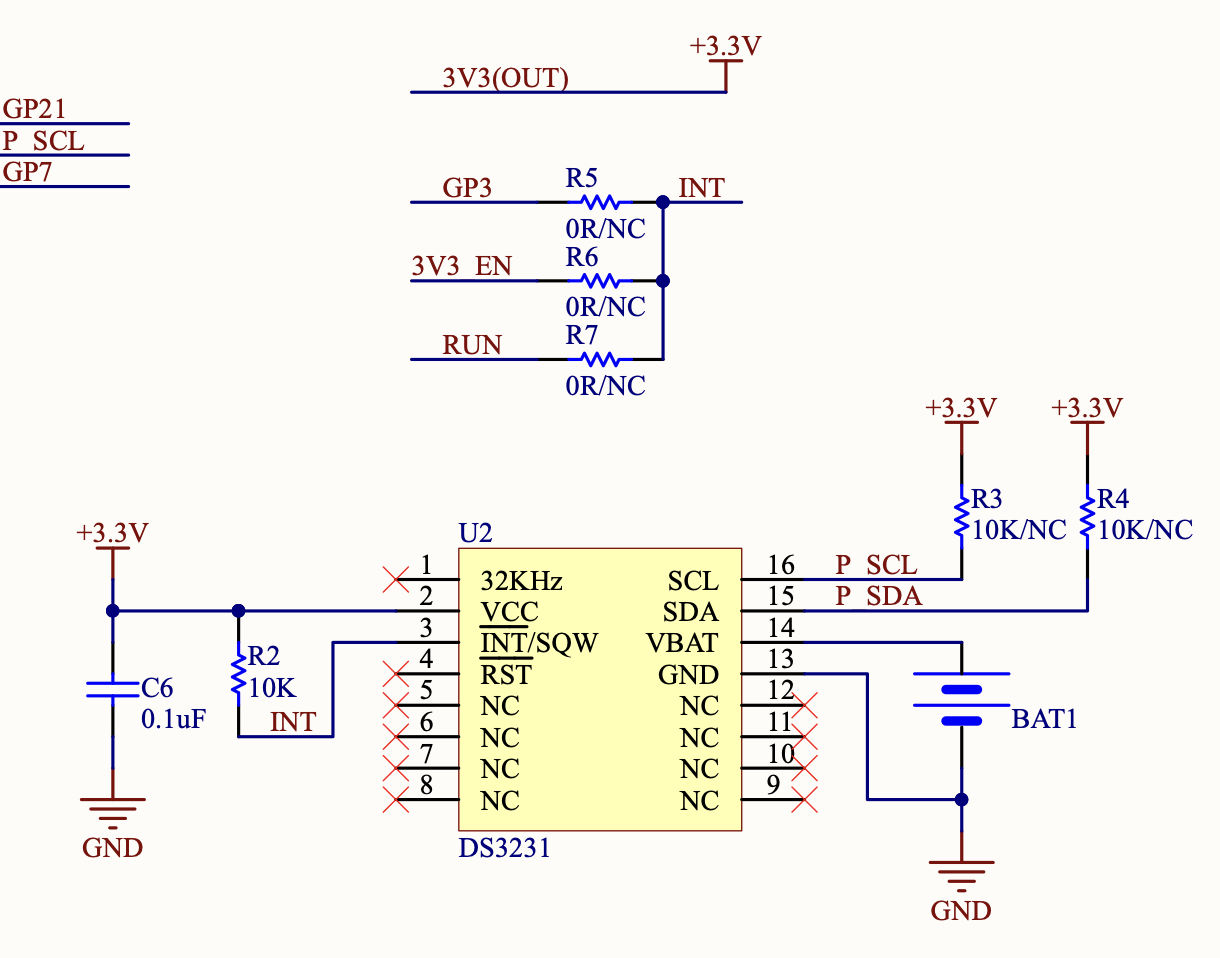
# https://www.waveshare.net/w/upload/0/08/Pico-RTC-DS3231_Sch.pdf
I2C_PORT = 0
I2C_SDA = 20
I2C_SCL = 21
SD_ON = 22
ALARM_PIN = 3
alarm_triggered = False
adc = ADC(Pin(26)) # ADC0 pin
class ds3231():
# 13:45:00 Mon 24 May 2021
# the register value is the binary-coded decimal (BCD) format
# sec min hour week day month year
NowTime = b'\x00\x45\x13\x02\x24\x05\x21'
w = ["Sunday","Monday","Tuesday","Wednesday","Thursday","Friday","Saturday"];
address = 0x68
start_reg = 0x00
alarm1_reg = 0x07
control_reg = 0x0e
status_reg = 0x0f
def __init__(self,i2c_port,i2c_scl,i2c_sda):
self.bus = I2C(i2c_port,scl=Pin(i2c_scl),sda=Pin(i2c_sda))
def set_time(self,new_time):
hour = new_time[0] + new_time[1]
minute = new_time[3] + new_time[4]
second = new_time[6] + new_time[7]
week = "0" + str(self.w.index(new_time.split(",",2)[1])+1)
year = new_time.split(",",2)[2][2] + new_time.split(",",2)[2][3]
month = new_time.split(",",2)[2][5] + new_time.split(",",2)[2][6]
day = new_time.split(",",2)[2][8] + new_time.split(",",2)[2][9]
now_time = binascii.unhexlify((second + " " + minute + " " + hour + " " + week + " " + day + " " + month + " " + year).replace(' ',''))
#print(binascii.unhexlify((second + " " + minute + " " + hour + " " + week + " " + day + " " + month + " " + year).replace(' ','')))
#print(self.NowTime)
self.bus.writeto_mem(int(self.address),int(self.start_reg),now_time)
def alarm_irq_handler(self, pin):
global alarm_triggered
alarm_triggered = True
def set_alarm_time(self, alarm_time):
self.alarm_pin = Pin(ALARM_PIN, Pin.IN, Pin.PULL_UP)
self.alarm_pin.irq(handler=self.alarm_irq_handler, trigger=Pin.IRQ_FALLING)
# ステータスフラグクリア
status = self.bus.readfrom_mem(self.address, self.status_reg, 1)
self.bus.writeto_mem(self.address, self.status_reg, bytes([status[0] & 0xFE]))
# コントロールレジスタ設定 (INTCN=1, A1IE=1)
self.bus.writeto_mem(self.address, self.control_reg, b'\x07')
# アラーム時刻設定
hour = alarm_time[0] + alarm_time[1]
minute = alarm_time[3] + alarm_time[4]
second = alarm_time[6] + alarm_time[7]
date = alarm_time.split(",", 2)[2][8] + alarm_time.split(",", 2)[2][9]
now_time = binascii.unhexlify((second + minute + hour + date).replace(' ', ''))
self.bus.writeto_mem(self.address, self.alarm1_reg, now_time)
def get_date(self):
t = self.bus.readfrom_mem(self.address, self.start_reg, 7)
year = 2000 + bcd2dec(t[6])
month = bcd2dec(t[5])
day = bcd2dec(t[4])
return year, month, day
# time format conversion
def bcd2dec(bcd):
return ((bcd >> 4) * 10) + (bcd & 0x0F)
def sdmount_getlist():
sd = sdcard.SDCard(machine.SPI(0), machine.Pin(17))
os.mount(sd, '/sd')
files = os.listdir('/sd') # set to mount point
for file in files:
print(file)
def get_adc_write(filename):
value = round((adc.read_u16() >> 4) * 3.3 * 3 / 4096, 2) # calculate real voltage and round to 2 degits below decimal point
print(value)
with open(filename, 'a') as f:
f.write("{}\n".format(value))
def add_one_minute_to_rtc_time(rtc):
# RTCから生の7バイトを取得(BCD形式)
t = rtc.bus.readfrom_mem(rtc.address, rtc.start_reg, 7)
year = 2000 + bcd2dec(t[6])
month = bcd2dec(t[5] & 0x1F)
day = bcd2dec(t[4] & 0x3F)
hour = bcd2dec(t[2] & 0x3F)
minute = bcd2dec(t[1] & 0x7F)
second = bcd2dec(t[0] & 0x7F)
weekday = t[3] & 0x07 # 1-7
# 月ごとの日数 (うるう年考慮)
def is_leap(year):
return (year % 4 == 0 and year % 100 != 0) or (year % 400 == 0)
def days_in_month(y, m):
mdays = [31, 29 if is_leap(y) else 28, 31, 30, 31, 30, 31, 31, 30, 31, 30, 31]
return mdays[m-1]
# 1分加算
minute += 1
if minute >= 60:
minute = 0
hour += 1
if hour >= 24:
hour = 0
day += 1
weekday = weekday + 1 if weekday < 7 else 1 if day > days_in_month(year, month):
day = 1
month += 1
if month > 12:
month = 1
year += 1
# 曜日文字列
w = ["Sunday","Monday","Tuesday","Wednesday","Thursday","Friday","Saturday"]
weekday_str = w[weekday-1]
# alarm_time 文字列形式 'HH:MM:SS,Weekday,YYYY-MM-DD'
alarm_time_str = "{:02d}:{:02d}:{:02d},{},{:04d}-{:02d}-{:02d}".format(
hour, minute, second, weekday_str, year, month, day)
return alarm_time_str
# set alrm time period
def set_alarm():
alarm_time_1min_later = add_one_minute_to_rtc_time(rtc)
print("Alarm time 1 min later:", alarm_time_1min_later)
rtc.set_alarm_time(alarm_time_1min_later)
if __name__ == '__main__':
# SD card power control
pow_pin = Pin(SD_ON, Pin.OUT)
pow_pin.value(0)
sdmount_getlist()
# make RTC instance
rtc = ds3231(I2C_PORT,I2C_SCL,I2C_SDA)
#rtc.set_time('15:38:00,Sunday,2025-09-14')
set_alarm()
# create file if not exists or open for append later
year, month, day = rtc.get_date()
filename = "/sd/{:04d}-{:02d}-{:02d}.txt".format(year, month, day)
with open(filename, 'a') as f:
pass # to create if not exist
get_adc_write(filename)
try:
while True:
if alarm_triggered:
alarm_triggered = False
set_alarm()
get_adc_write(filename)
except KeyboardInterrupt:
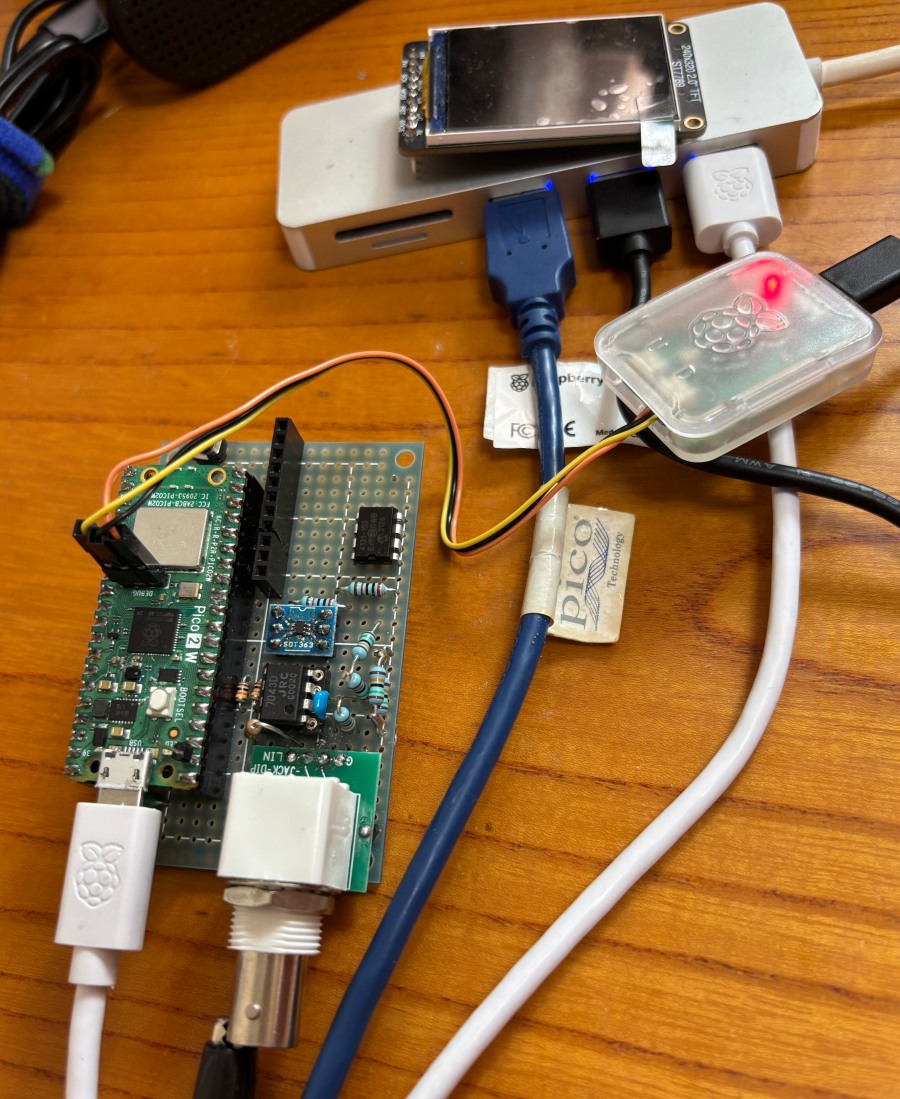
print("terminated")<写真>
表裏です、裏はもりそばです
admin