前回の記事、
この記事に関連して、PWMの周波数が1/2**nだと綺麗にADCからの値取れるけど、任意の周波数入れると値がミックスしてグタグタ状態、なんでかなと色々調べると結局ADC変換のDMAがデバッガーで止めても動き続けるからどんどん同じ領域に上書きされるせい、たまたま1/2**nだと少なくとも位相はずれないから問題ないように見えるだけという結論
この検証のために、
① 正弦波入力してみたけどデータが綺麗に昇順降順にはならなかったから気づいた
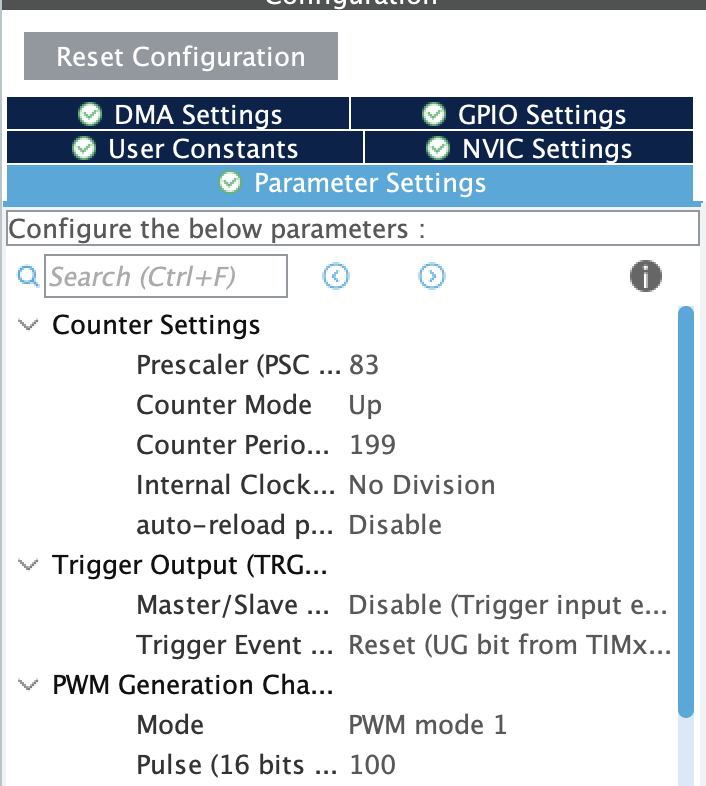
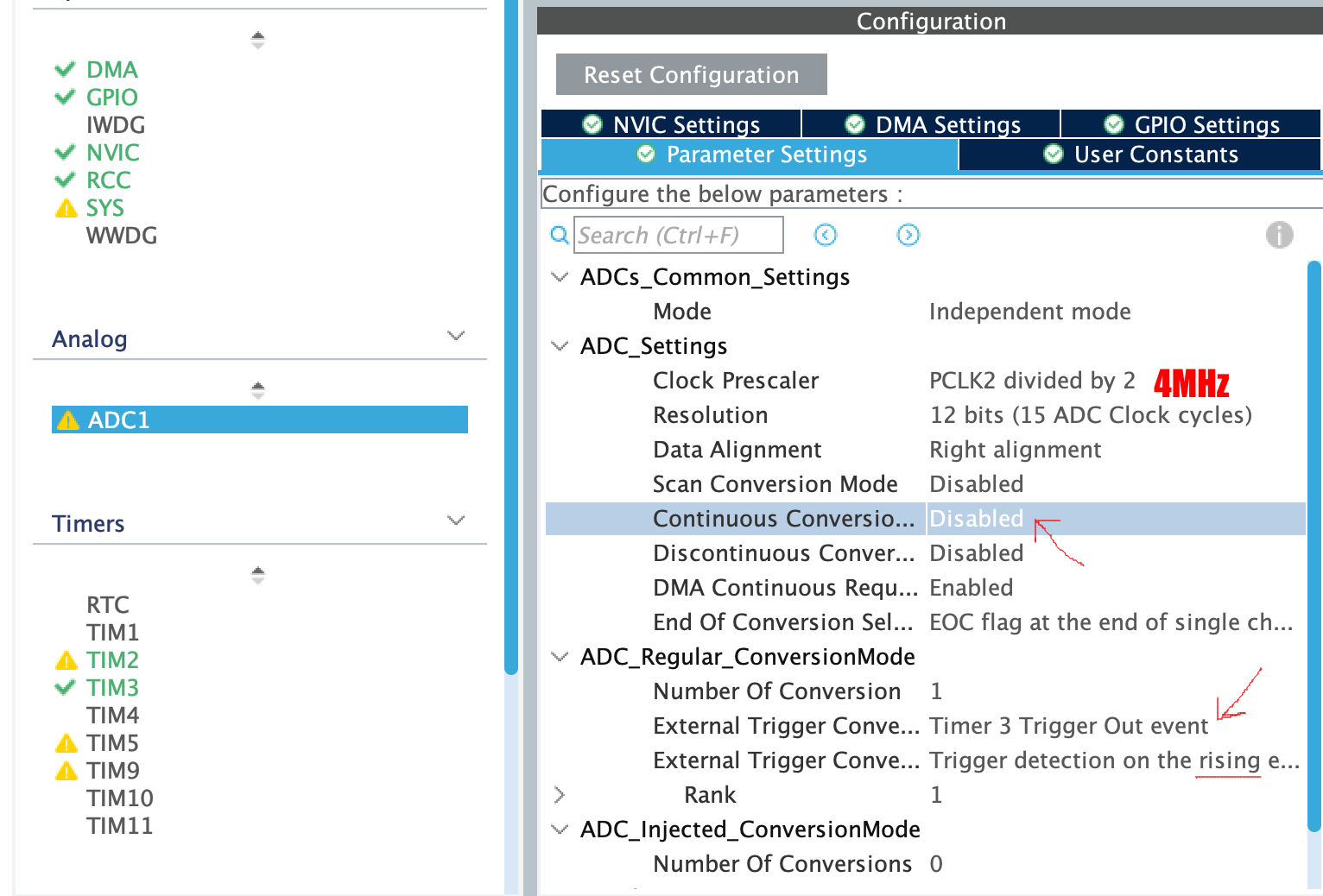
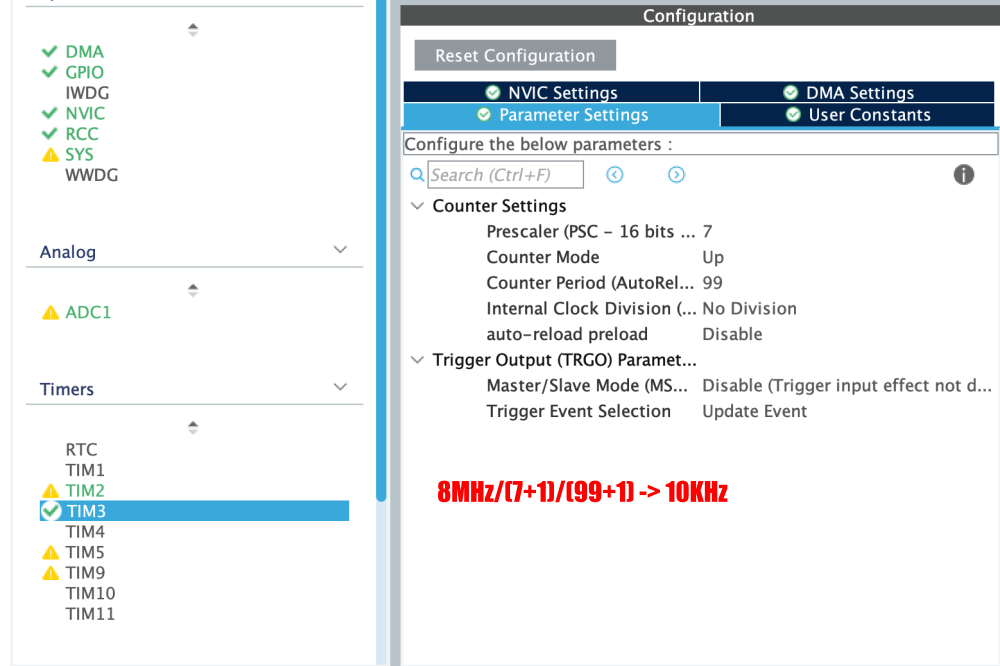
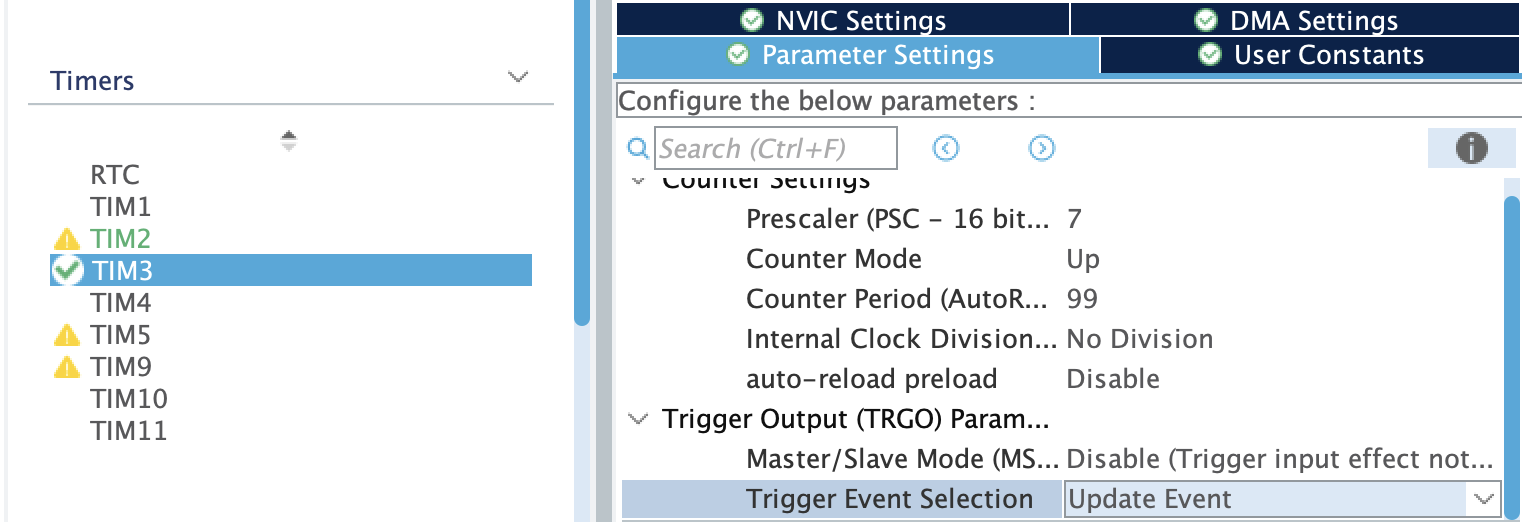
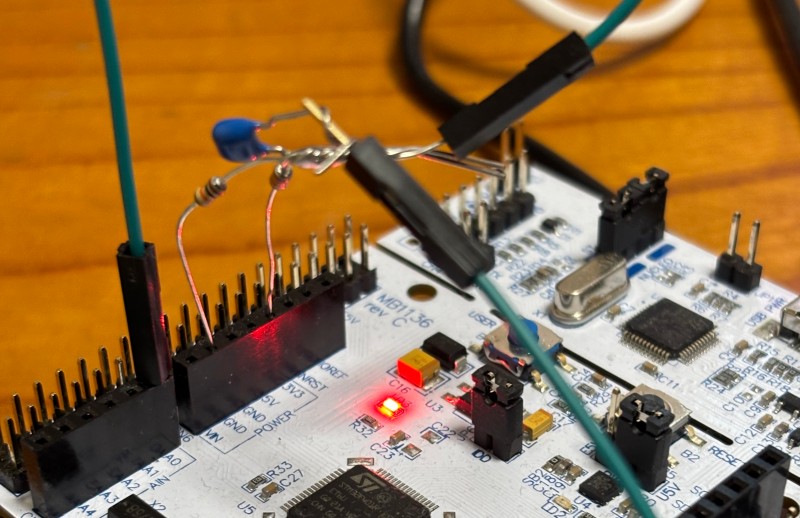
10KΩ抵抗でGND – VCCを分割してcap(1.5μF)でカップリング、つまり電源電圧の中点をオフセット電圧にして、周波数5KHz、電圧は2V p-p(USBオシロの信号発生器を使う)、ADCのサンプリング周波数は100KHz
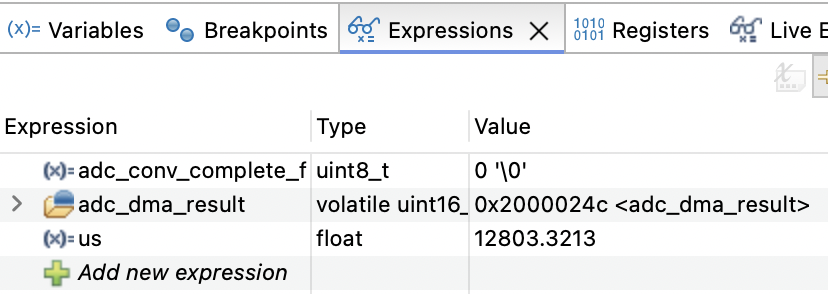
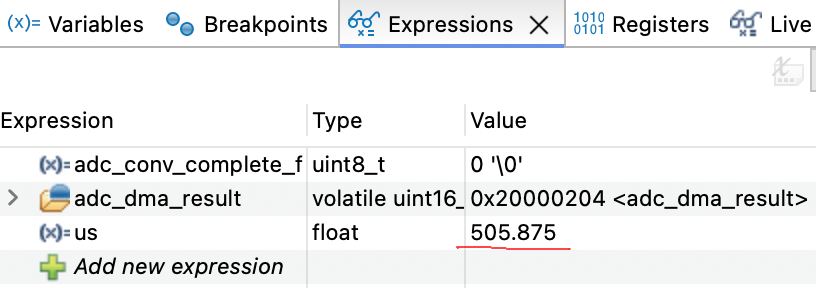
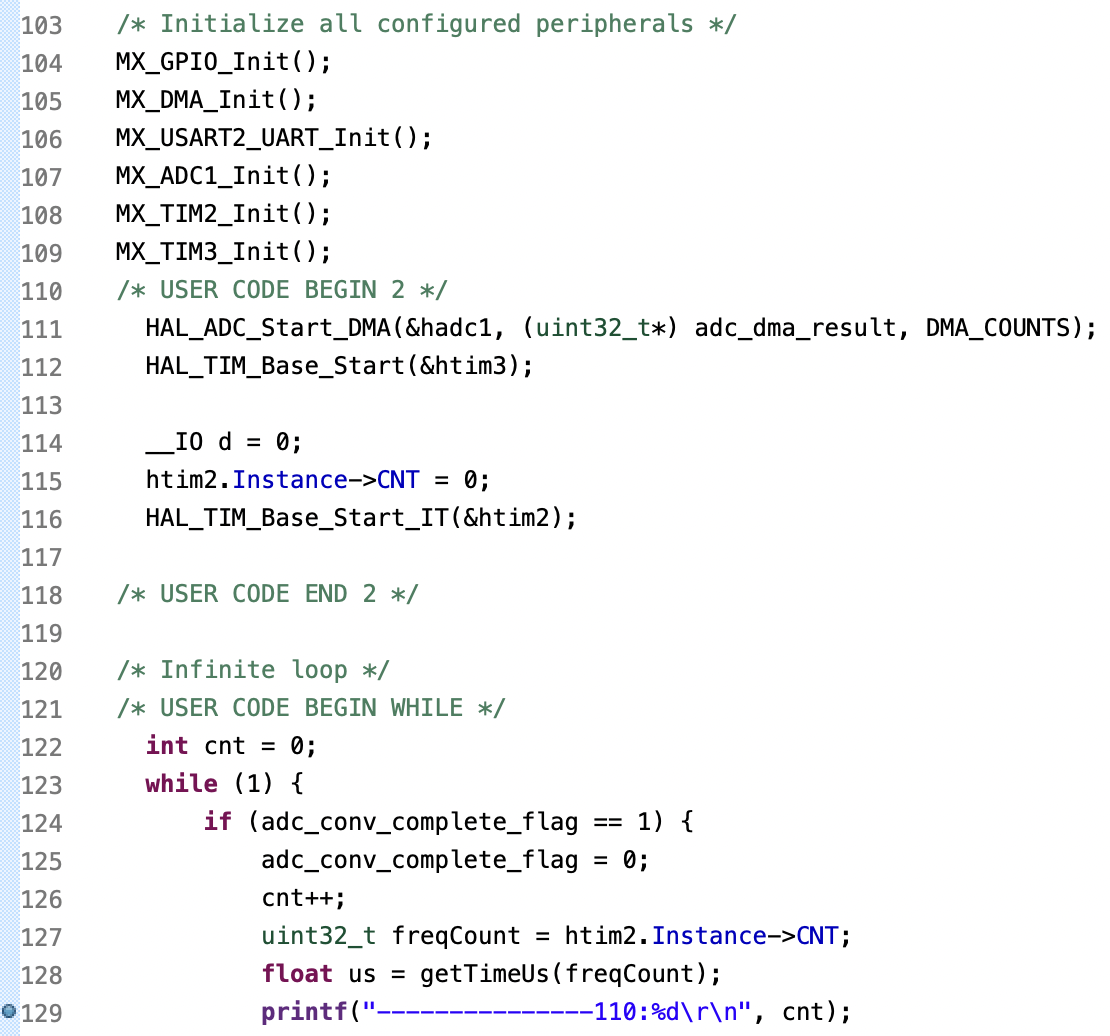
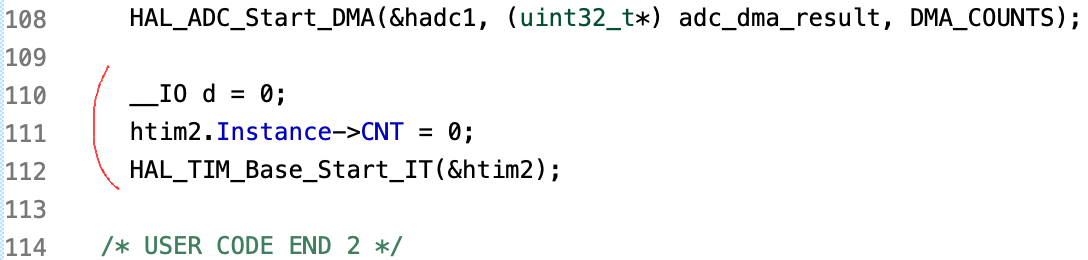
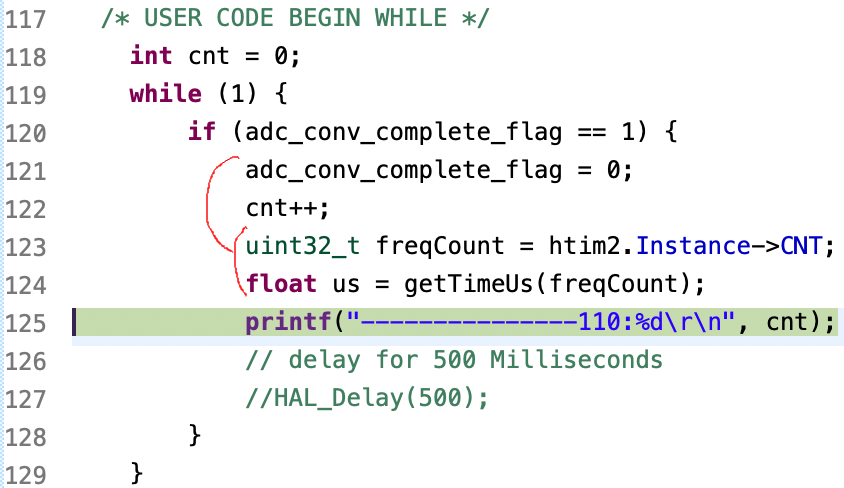
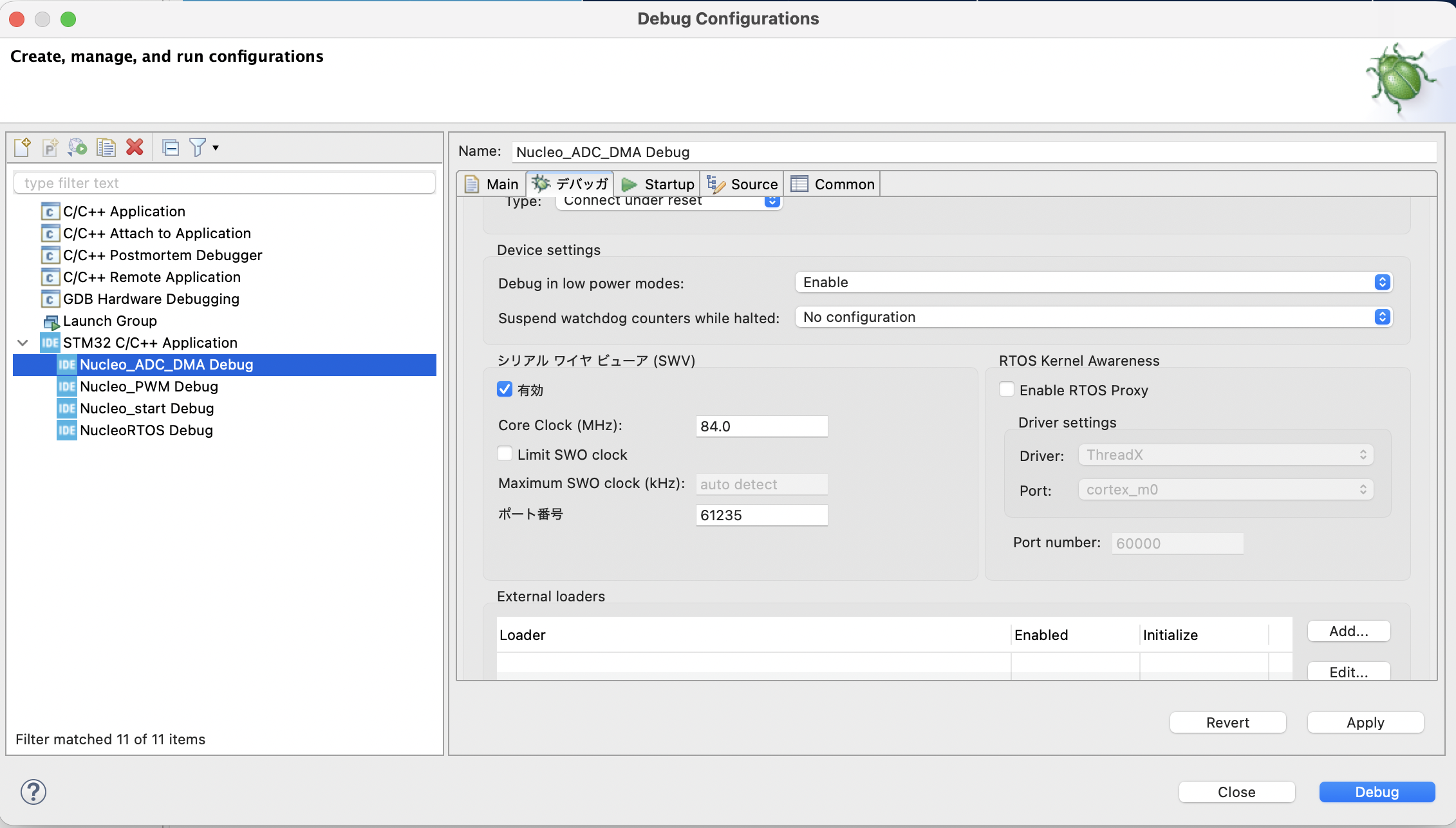
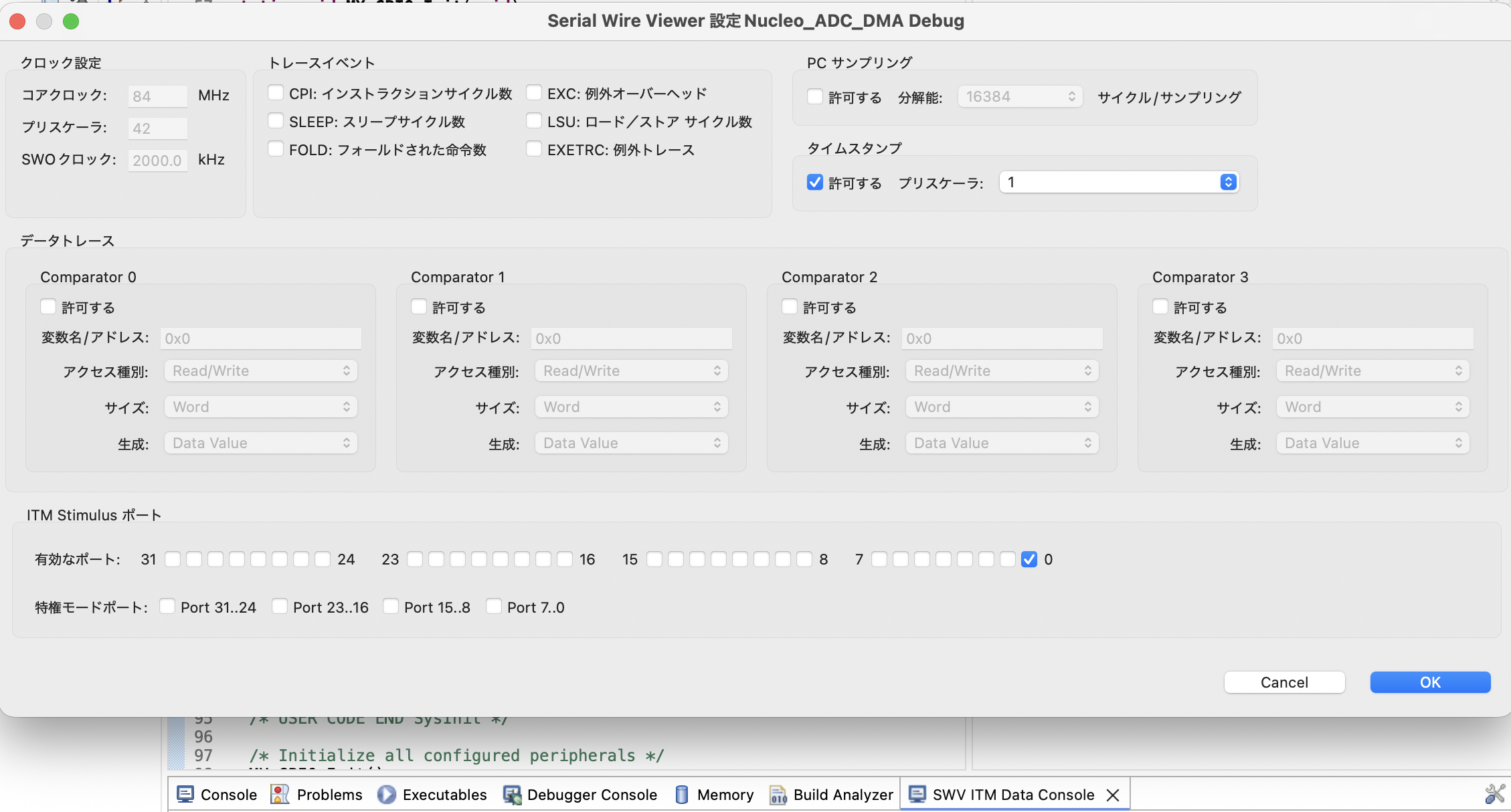
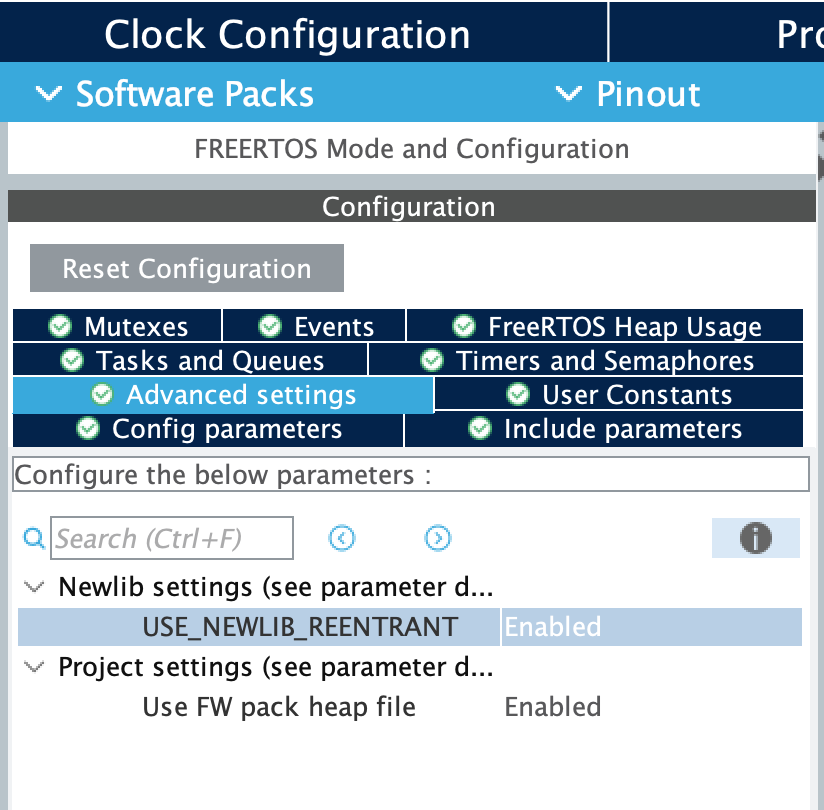
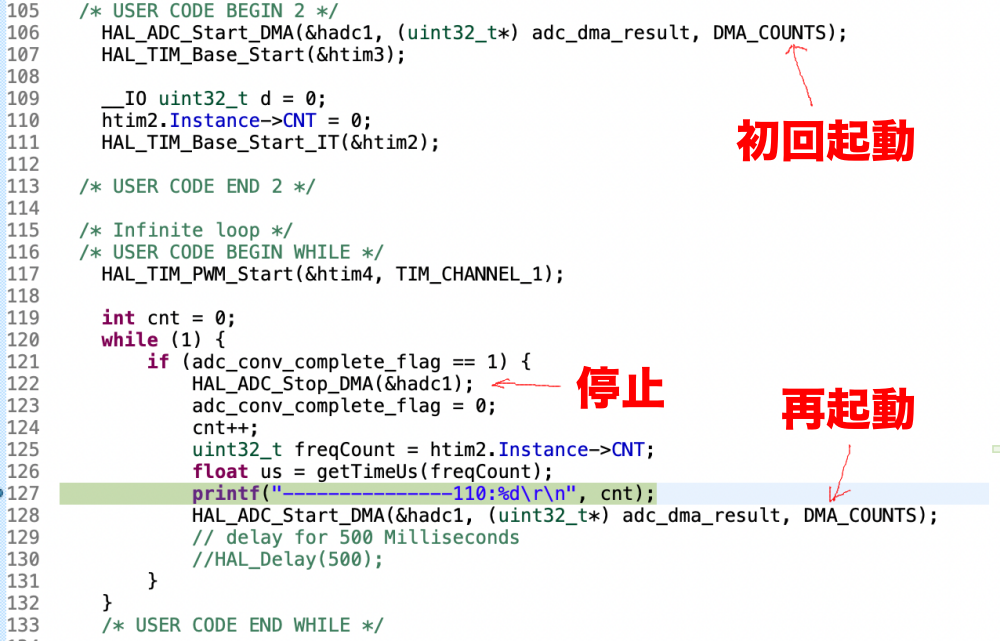
データレディのタイミングでDMA停止させて、ブレークポイントの先で再起動するように変更
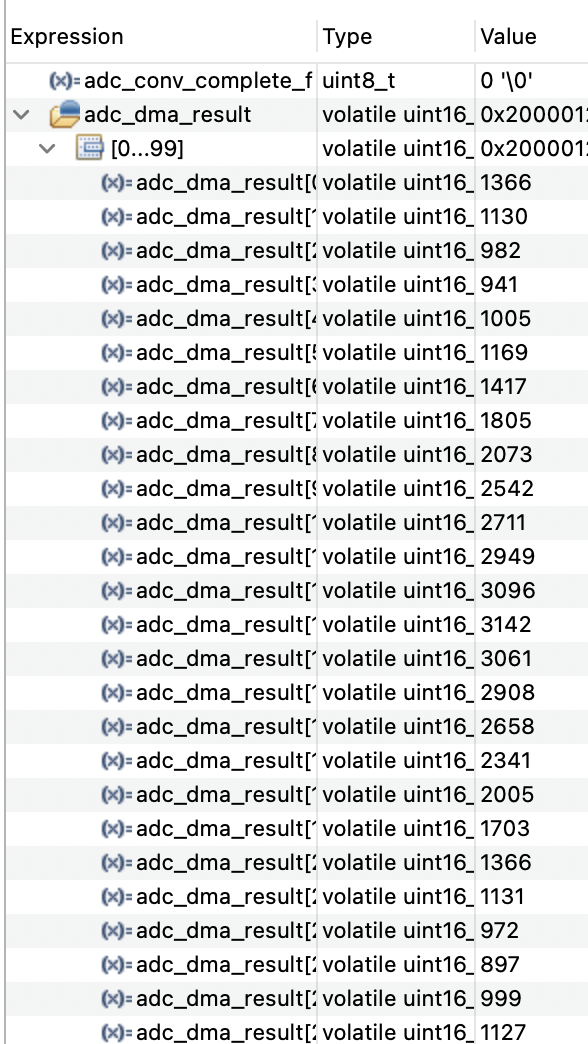
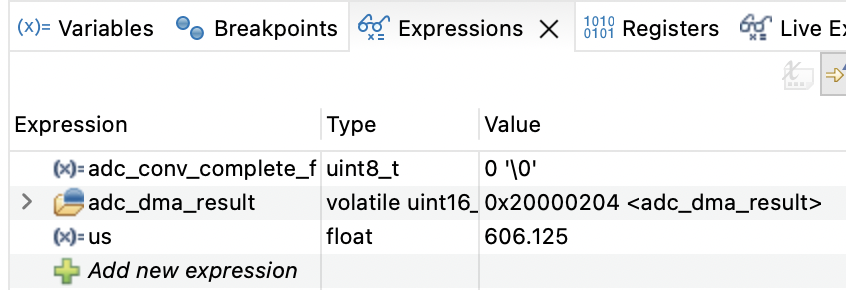
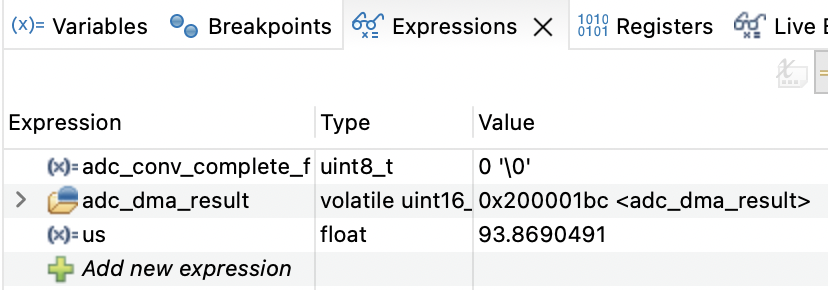
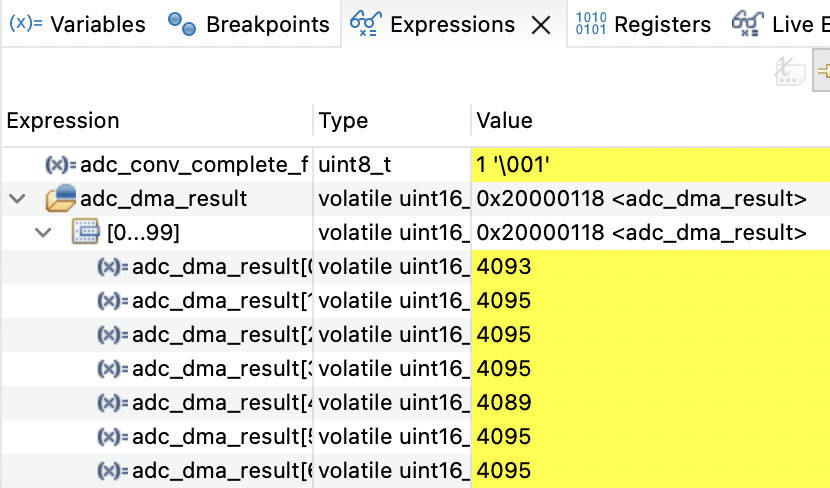
概ね、20サンプルで1サイクルの値(単調増加と単調減少)が確認できた、数字的にも1.65 V ± 1Vぐらいの雰囲気
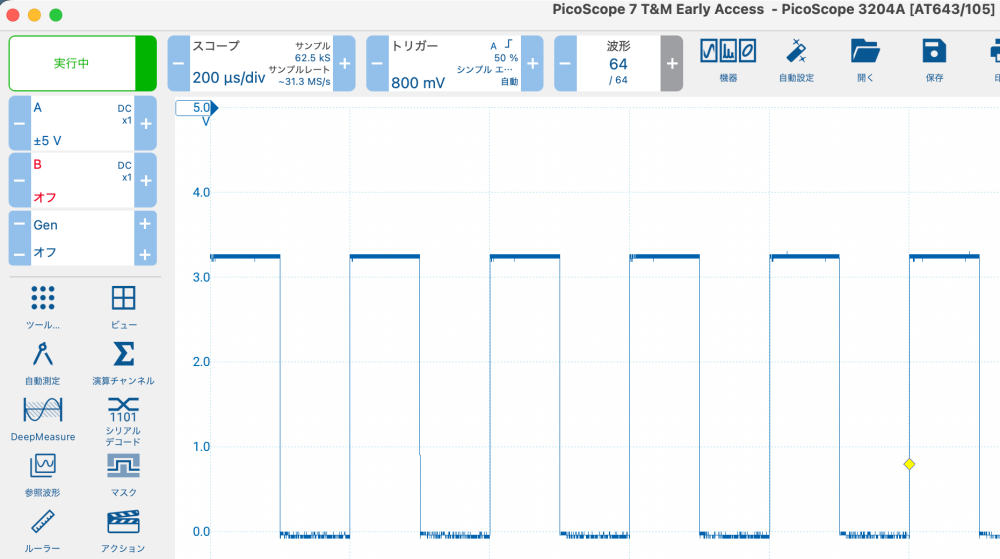
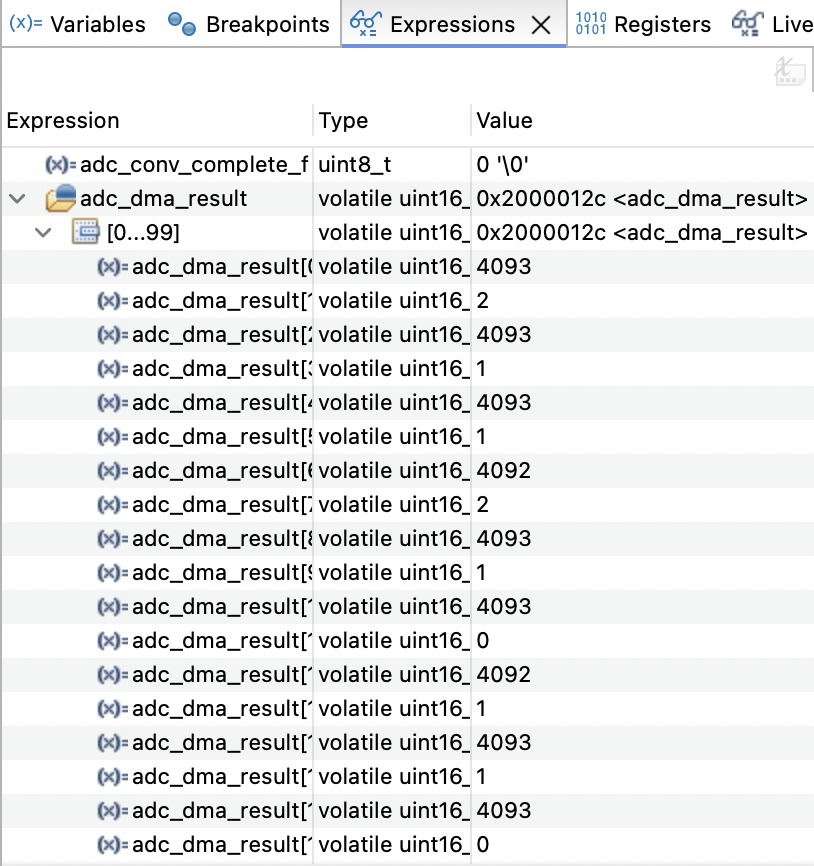
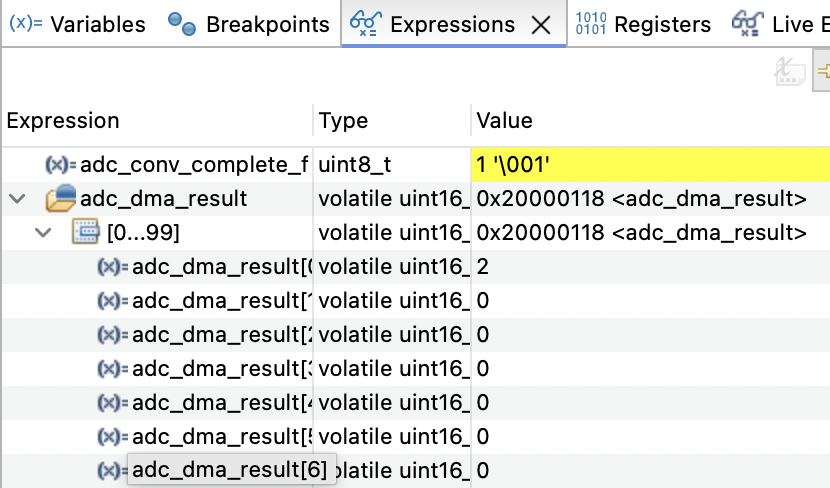
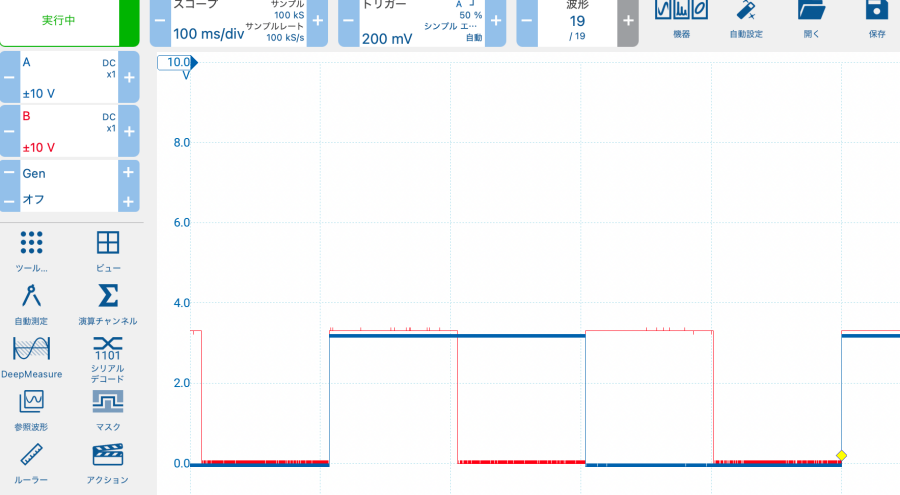
② PWMで5KHzを入力
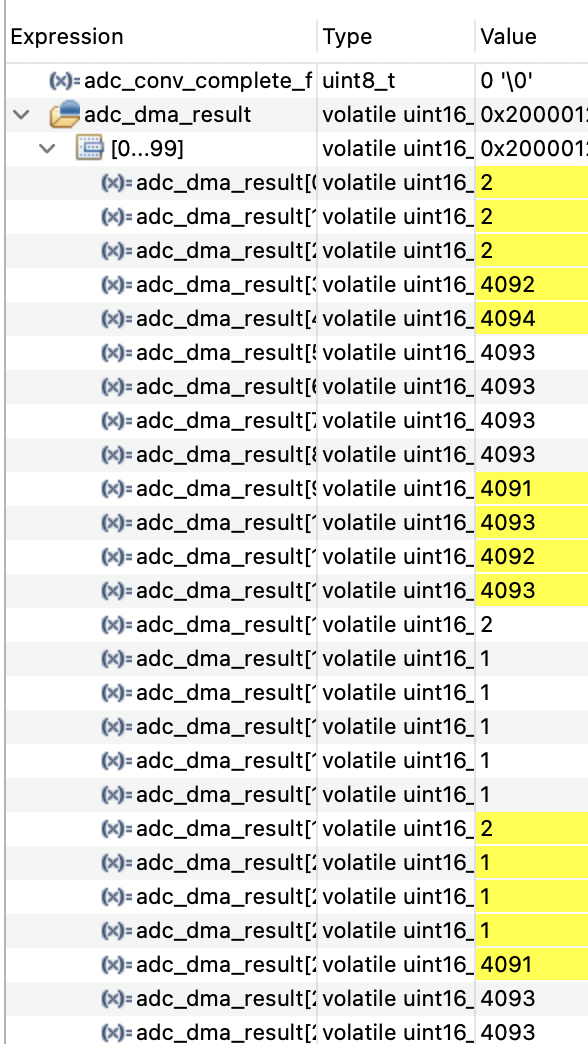
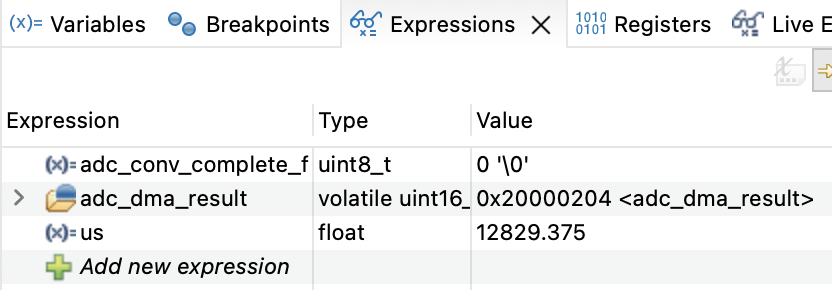
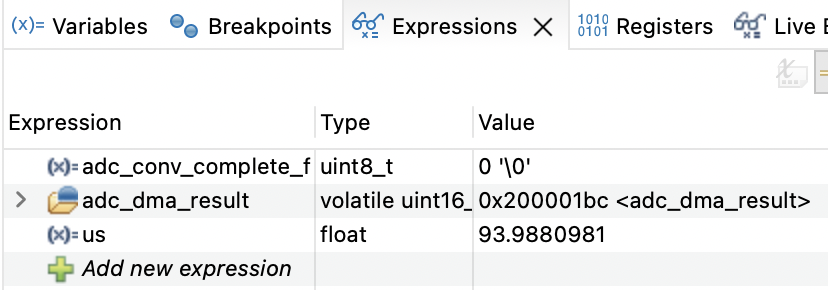
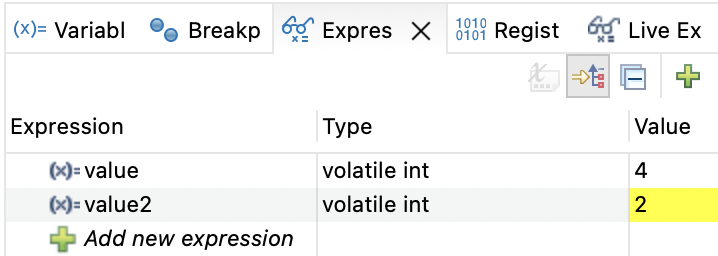
こちらも概ね20サンプルで周回が確認できた、複数回停止しているので前回と値が変わったところは黄色になってる、上書きされると4095付近と0付近が混合されたメチャクチャな値になってた
<学び>
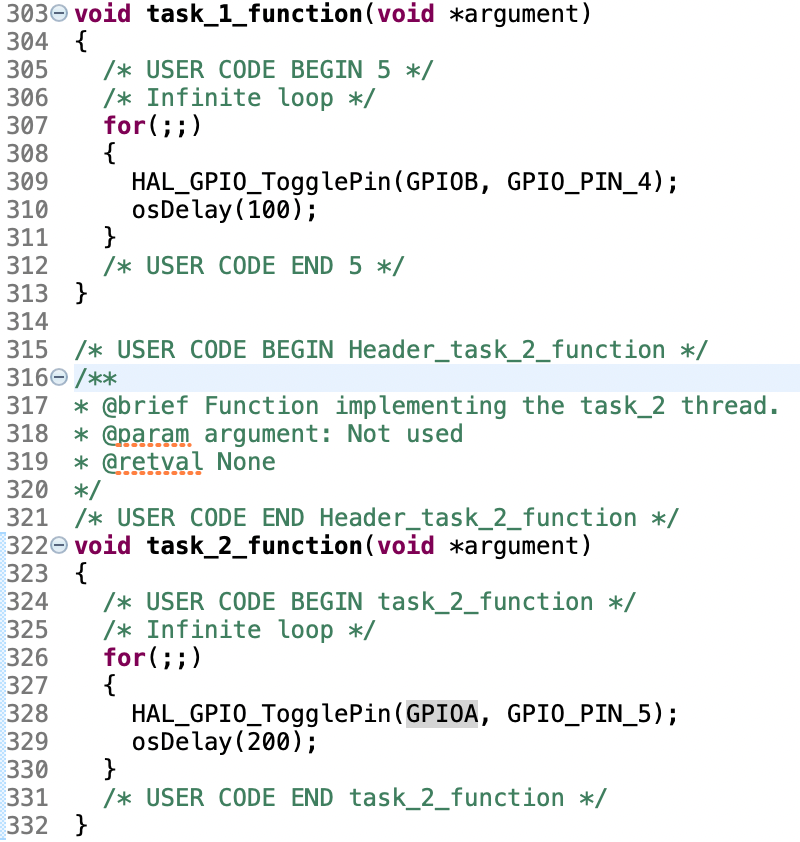
STM32のペリフェラルはCPUの状態関係なく動作するから、デバッグ時には考慮が必要
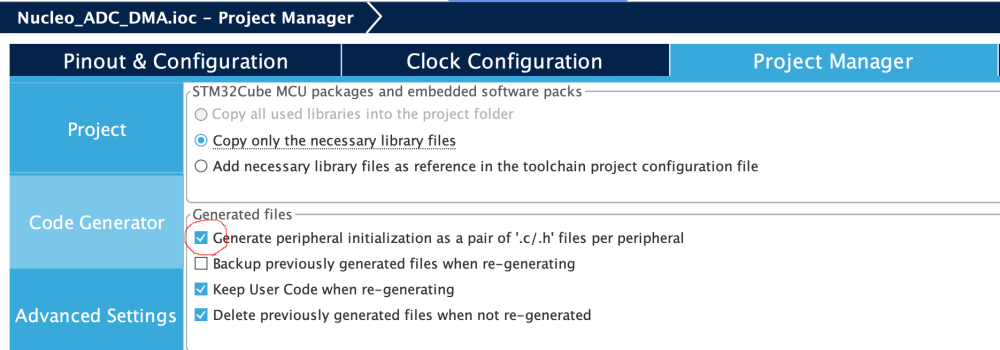
P.S. あとCubeMXの設定変更後に一度buildしてもdebuggerモード起動すると再度buildが必要になるのはMacのCubeIDEによくある問題らしい、二回buildすればいいだけではあるけども、debugger起動時にbuild結果の整合性チェックが通らないらしい
admin