以前の記事ですが、
https://isehara-3lv.sakura.ne.jp/blog/2025/04/06/apple-silicon系のmacbookでnasへのtimemachineバックアップ失敗/
この時点でまだバックアップ設定は成功していなかった
<第一段階の設定の追加>
・NASは毎日5:00AMに起動していて、数時間経過(毎日のバックアップが完了したと思う頃)したら電源オフをプログラム設定している
・MacBook設定 -> これはハズレだったので週一のリフレッシュブートに戻す
% sudo pmset repeat wakeorpoweron MTWRFSU 05:10:00
% pmset -g sched
Repeating power events:
wakepoweron at 5:10AM every day
設定を戻した、restartと他の設定は共存できないから
% sudo pmset repeat restart S 05:00:00
% pmset -g sched
Repeating power events:
restart at 5:00AM Saturday
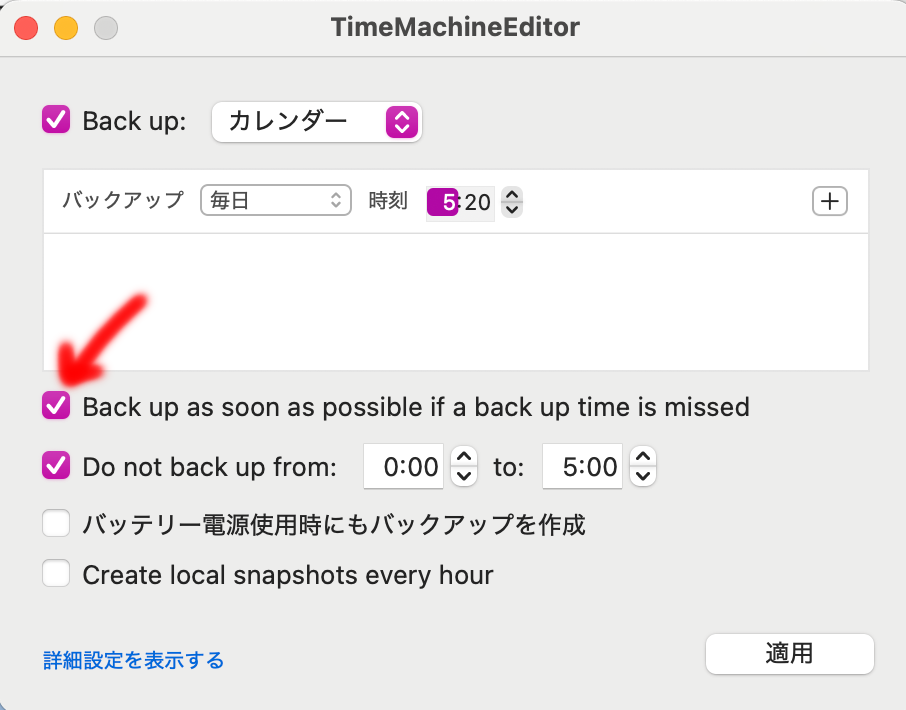
・TimeMachinEditorはバックアップできなかったらリトライする設定 -> 本質ではないけどリブート後の自動スタート(ログオンしたらtimemachineが自動起動)には有効であった
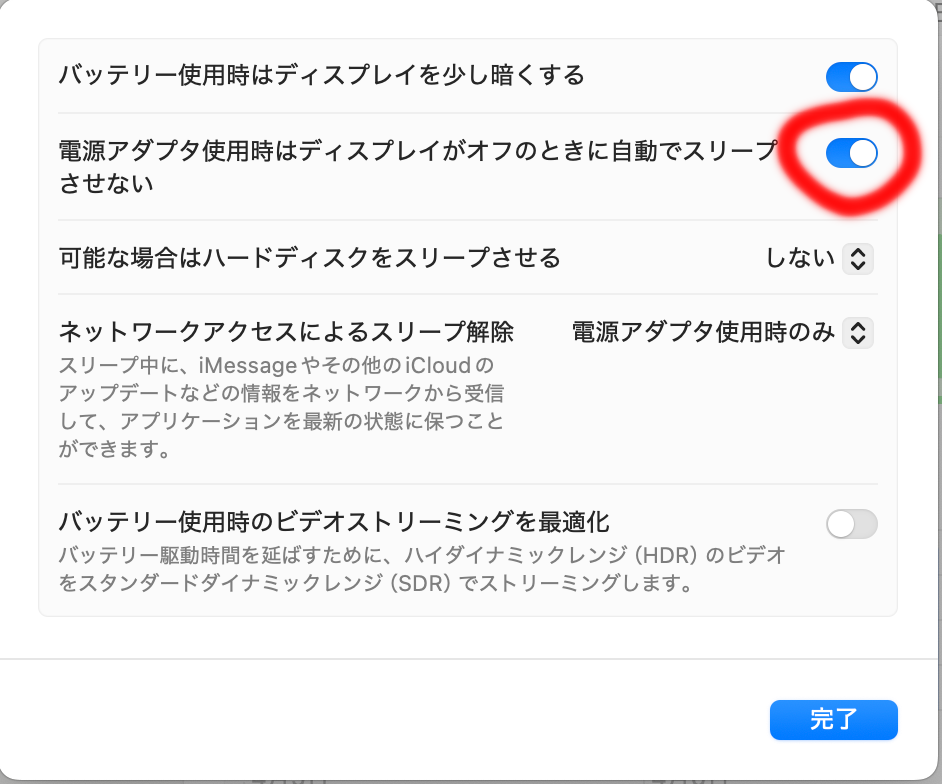
・バッテリーでディスプレイオフ時にスリープさせない -> 本質ではない
<ログファイルから対策>
(2025/4/10)
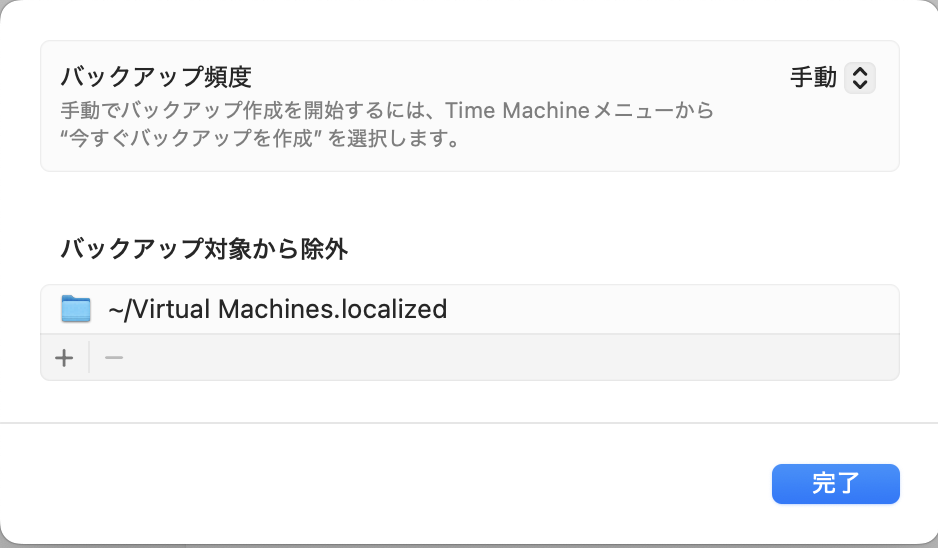
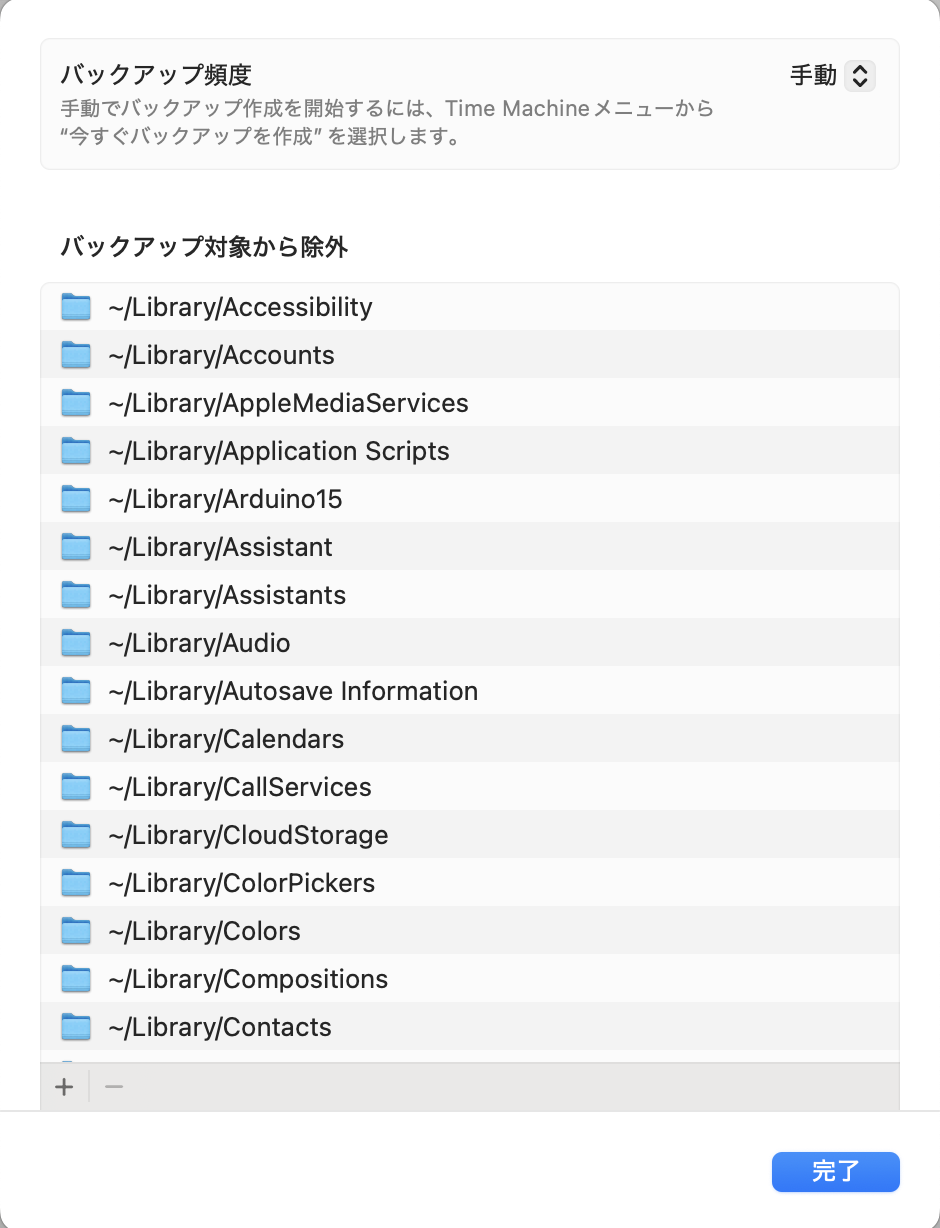
今朝うまくいかなかったログをLLMに入れると、解決案として~/Logを除外するというのがあったから除外を設定
但しアプリの設定も復元したいならば全部を除外してはいけない
—————————–
~/Library/Application Support や ~/Library/Preferences を 除外しないように注意。
アプリによっては ~/Library/Containers に大事なデータを保存していることもある。
—————————–
とあったからその三つのディレクトリは対象にした
設定後のシステムログからtimemachineバックアップ関連を抽出
log show --predicate 'subsystem == "com.apple.TimeMachine" AND eventMessage CONTAINS "Backup"' --style syslog --info --start "2025-04-13 05:00:00" --end "2025-04-13 06:00:00" --timezone local〜〜〜前後省略して結果だけ〜〜〜
2025-04-11 05:41:47.556152+0900 localhost backupd[504]: (TimeMachine) [com.apple.TimeMachine:CopyProgress] Finished copying from volume “Data”
77624 Total Items Added (l: 3.7 GB p: 3.89 GB)
23459 Total Items Propagated (shallow) (l: Zero KB p: Zero KB)
2718279 Total Items Propagated (recursive) (l: 467.4 GB p: 236.17 GB)
2795903 Total Items in Backup (l: 471.1 GB p: 240.06 GB)
66165 Files Copied (l: 3.37 GB p: 3.54 GB)
9056 Directories Copied (l: Zero KB p: Zero KB)
2271 Symlinks Copied (l: 171 KB p: Zero KB)
17029 Files Move Skipped (l: Zero KB p: Zero KB) | 17029 items propagated (l: 4.12 GB p: 4.1 GB)
6430 Directories Move Skipped (l: Zero KB p: Zero KB) | 2677791 items propagated (l: 463.29 GB p: 232.06 GB)
80 Files Cloned (l: 191 KB p: 328 KB)
52 Files Delta Copied (l: 332.8 MB p: 346.6 MB)
この時刻がデスクトップから見える終了時刻、実際にはこの後unmount処理されて終了
以上で3日間は正常(土曜日は再起動後にtimemachineが走り始めたけど、これはTimeMachineEditorの設定が効いている)なので、とりあえず問題は回避できていると思って良さそう、要はtimemachineバックアップでLogファイルをロックできなくてバックアップ処理が途中で止まっていたのが問題で、対象(復元には無関係だろう)のLogファイルをバックアップの処理対象から除外したということ、除外した三つのLogディレクトリをバックアップ時に同じことが起こらないのかという疑問はありますが
admin