Nodeの発売元は、Lenbrookと言うんだ。Wi-Fi内スキャンでメーカー名出てきたのでちょっと調べてみた。
創業以来40年以上経過しているので、長いキャリアのカナダの会社。オーディオファン(music lover)向けのプロダクトを出していると。
admin

la vie libre
Nodeの発売元は、Lenbrookと言うんだ。Wi-Fi内スキャンでメーカー名出てきたのでちょっと調べてみた。
創業以来40年以上経過しているので、長いキャリアのカナダの会社。オーディオファン(music lover)向けのプロダクトを出していると。
admin

Node登録のネットラジオ局のビットレートは不明ですが、少なくとも無償のSpotifyでの最高品質160Kbpsはそれなりで、Volumio + i2s DACの320Kbpsには及びません。
ということで、Volumio登録で320Kbpsの曲をリストしてみた。ルーマニアの局はオーディオボリュームレベルが高め。
自分にとっての定番はLinnですね。自分のところで販売している音源に限定されますが。Linn classicalはNodeにも登録されていて、切り替えてもVolumioとNodeで違いわかりません。つまり、i2s DACの優秀さです。
直接の関係はないですが、ルーマニ語は飛地ですがロマンス語系統になるんだそうです。
admin
リサーチした結果で、やはり選択はBluesoudのNode。やはりソフトがキモで、海外メーカーの方が出来が良い。
Amazon Musicなら現状国内メーカーではMarantzしかないけど、ソフトの評価はいまいち。
納入状態、ちょっとおしゃれな箱に入ってます。
設定は、最初有線LANが手元にあったので有線で接続。そうすることでAPモードでWi-Fi設定の必要もないから。
最初BluOSコントローラーをMacBookに入れてたけど挙動不審(動かない)。で、iPadにインストールしたら当たり前にちゃんと動いた。写真は外部ディスク(USB接続)で音楽ファイル取り込みもきちんとできてます。
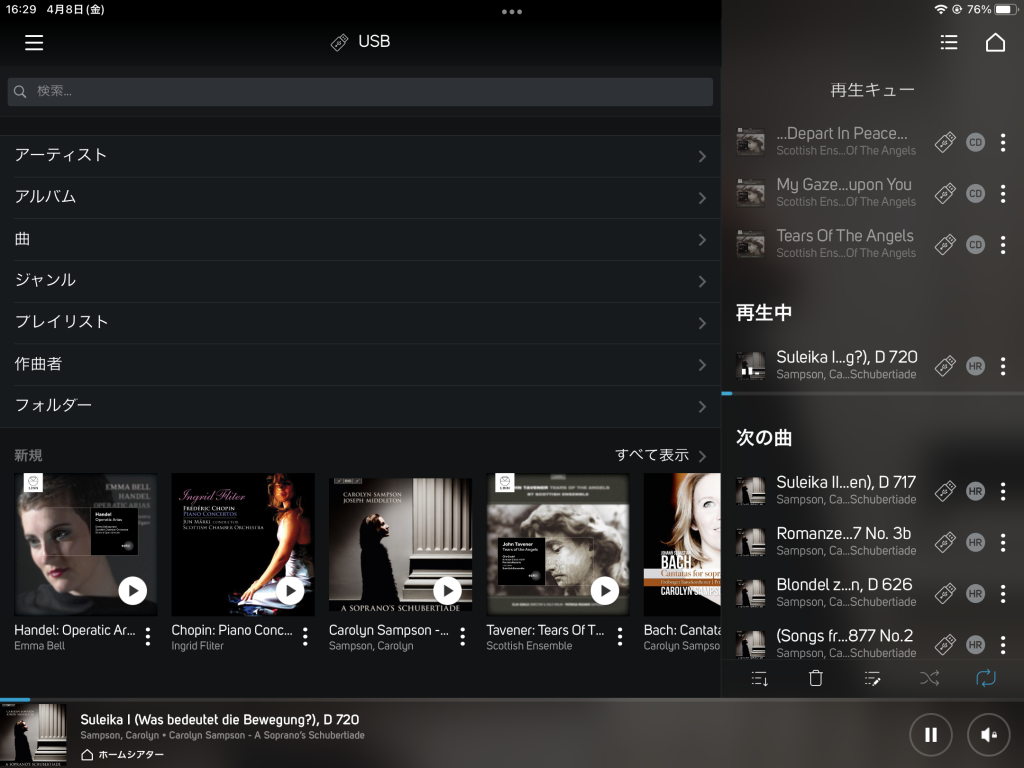
Spotifyは無償アカウントでも接続できて(Volumioは有償アカウントだけ接続可能でAmazon MusicはAmazonがAPI公開しないらしくて使えない)ラジオ的に使えます。
音はVolumioのI2S DACも優秀だったけれども、それ以上の品質だから、聞き流しオーディオには十二分と言えます。
admin
と言うwarningメッセージが出てて、どうもqnapのメールはユーザのsmtpサーバ経由で配信するらしくて、そのsmtpサーバーにqnapを信頼できる要求元と認識させないといけないようです。
初回にどうやったか記憶にないのですが、今のoutlook.jpでは再認証できなかったので、googleメールで認証更新しました。

admin
割とよくあることばかりかも知れませんが、ほぼ一年経過しての経験値のまとめです。
① 造形時の脱調現象と補正方法
コトコト(ゴトゴト)音がしてフィラメントが送れない、これは送りモーターの脱調(トルクが大きすぎてステッピングモーターがステップを刻めない)です。
造形でラフトを作るときに発生したので、キャリブレーションを再度実施して対応しました。
https://idis.dev/blog/adventure3-noise/
② フィラメントがフィードできない時のノズル清掃
これも現象としては脱調と同じくコトコト音が発生してフィラメントを送り出せず、設定から送りを選択してもフィラメントはノズルから出てきません。
ヘッド詰まりのようだったので、添付のツールでヘッドクリーニングで対応。
https://locaq.hatenablog.com/entry/2018/08/25/222659
ガイドチューブは壊さない程度の力では抜けなかったので、10mmのフレアナットレンチでネジ緩めて外しました。
③ 造形物がラフトから剥がれない(剥がれづらい)
設定でラフトとの距離をデフォルトから増加して対応。

大きすぎると、密着しなくなるのでこの値(0.28mm)あたりが適切でした。
④ フィラメントが簡単に折れる、リールからスムーズに供給できない
フィラメントの吸湿で特性が変化して、吸湿すると硬くなるようです。一番の問題は硬さのせいでリールからスムーズに供給できなくなって折れる、あるいはフィラメント送り機構が脱調してまともに送れなくなること。さらには水分が加熱した時に樹脂が膨張してうまく成形できないというのもあるようです。
対策は低湿環境(デシケーター)に保管するか、数ヶ月以内で使い切るしかないと思います。
admin
OSアップデート後?のGPU自動切り替え(2019 MacBook pro 16)が動いていないようなので、強制的に切り替える手段として、gfxCardStatusなるものをインストールしてみた。

マニュアル切り替えになりますが、今のステータスもすぐに見れるので便利かも。
admin

過去しばらくは黎明期だったけれども、最近のネットワークオーディオプレイヤーは安定性が増してきているように思う。
以前はパソコンにUSB-DACつないでというような形式もあったけれども、これは使いずらい。
① 都度パソコン立ち上げ必要
② パソコンOSはレーテンシィ保証してないから、ほぼ確実に音が飛ぶ
というわけで、現在ではパソコン使うのはマイナーで専用の音楽サーバーが主流になってきているように思う。その中でも、
https://www.bluesound.com/products/node/
BluesoundのNodeなどは完成度が高いように思う。OSはおそらくベースはLinuxと想像しますが、それをカスタマイズしたBluOSという名称の専用OSにしているのも期待できるところ。
ネットワークオーディオはハードもさることながら、ソフトの完成度が使い勝手を左右するのだから、その点からは海外製品に一日の長があるように思う。
しばしリサーチ。
admin
Volumioつながらないからリブートして見たけれどもダメ。有線LANプリンタのwi-fi化に使っているnのwi-fi中継器もホスト探しているから、過去何回かあったaは使えるけどnが使えないパターンだろうとルーター再起動で復活。

リフレッシュブートと思ったほうがいいかもしれないけど、合間が開きすぎて忘れてしまいます。
admin
リレーが届いたので、交換完了。
音の違いはおそらく交換前後を二種類並べて聞き比べない限りは分かりません。

admin
半導体アンプの出力段のリレー(ポップアップノイズ対策とDC印加・短絡対策)は使っていくうちに必ず劣化していきますが、接触抵抗がありえないぐらいの値(1Ω近く)になっていたので交換することにした。
問題はおそらく該当のリレーは生産収束になっていること。
ネットを探し回って幸い秋月電子で使えるものが見つかったのでオーダー。
https://akizukidenshi.com/catalog/g/gP-16554/
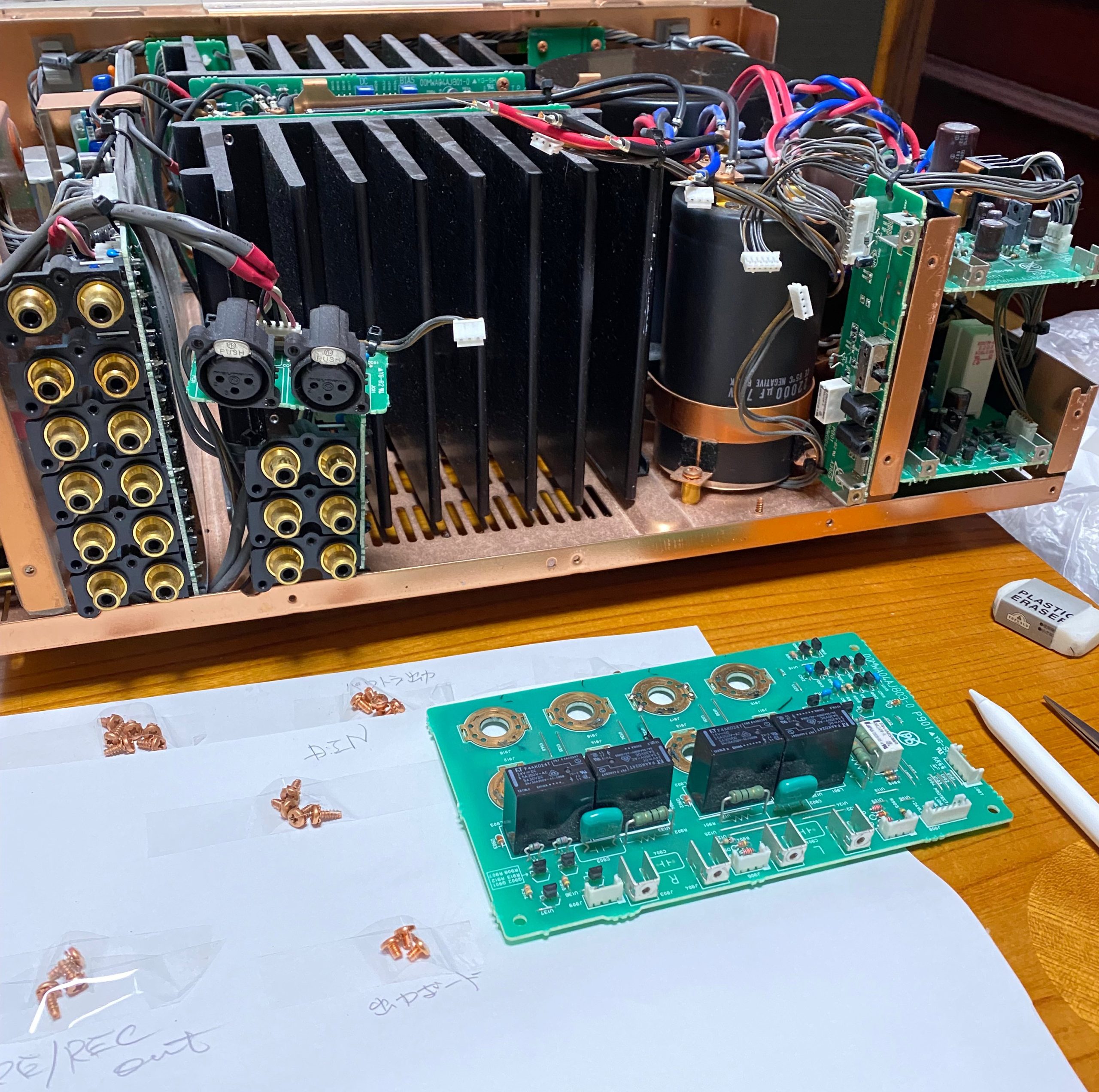
寿命部品なので、この際なので2セット分購入しました。接触抵抗って概ね100mΩ以下が普通です。
admin