
FreeRTOSでタスクのコントロールとタスク間通信ができれば、当面のやりたい事はできるようになります。
1. タスク遷移図
http://happytech.jp/wordpress/2017/02/25/rtos-for-iot-mcu-task-control/
に分かりやすい図があったので借用。
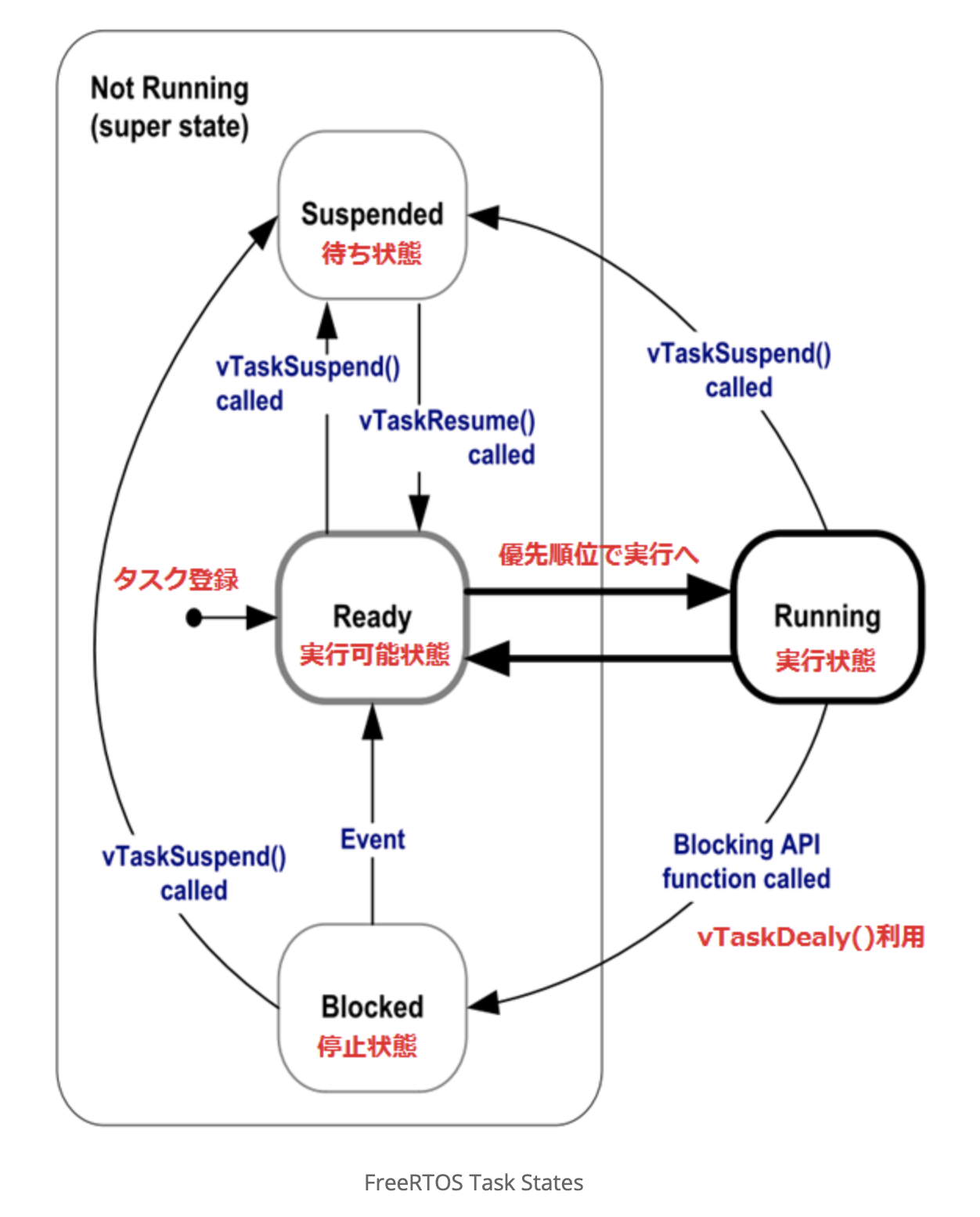
タスク中で時間待ちdelay()させてもタスクは実行権は手放さないので、他のタスクは動作できず、設定した時間だけ停止状態に入るvTaskDelay()関数が必要になります。この場合のEventとはタイムアウトになりますね。
2. タスク間通信
いろんな手法が存在しますが、queueを使うのが一番使いやすそうなので使ってみます。queueとは分かりやすく言えばFIFOです。最も軽量で使えるのはTask Notificationsのようですが、汎用性はqueueのほうがあります。
① queueの作成
1行目のxQueueCreate()でqueueの作成(定義)を行います。
QueueHandle_t xQueue = xQueueCreate( 10, sizeof( unsigned long ) );最初ループ処理の内側に入れてたので、メモリが枯渇してMalloc errorが出ました。領域確保は当然一回だけ必要です。
② 送信側
14行目のxQueueSend()でqueueにデータを送り込みます。
xStatus = xQueueSend(xQueue, &SendValue, 0);
③ 受信側
47行目のxStatus = xQueueReceive()でqueueからデータを取り出します。
xStatus = xQueueReceive(xQueue, &ReceivedValue, xTicksToWait);
QueueHandle_t xQueue = xQueueCreate( 10, sizeof( unsigned long ) );
void threadA( void *pvParameters )
{
int32_t SendValue = 0;
BaseType_t xStatus;
SERIAL.println("Thread A: Started");
while(1){
//for(int x=0; x<100; ++x)
//{
//SERIAL.print("A");
//SERIAL.flush();
web_server();
++SendValue;
xStatus = xQueueSend(xQueue, &SendValue, 0);
if(xStatus != pdPASS) // send error check
{
while(1)
{
Serial.println("rtos queue send error, stopped");
delay(1000);
}
}
myDelayMs(2000);
//}
// delete ourselves.
// Have to call this or the system crashes when you reach the end bracket and then get scheduled.
//vTaskDelete( Handle_bTask );
}
SERIAL.println("Thread A: Deleting");
vTaskDelete( NULL );
}
//*****************************************************************
// Create a thread that prints out B to the screen every second
// this task will run forever
//*****************************************************************
void threadB( void *pvParameters )
{
BaseType_t xStatus;
int32_t ReceivedValue = 0;
const TickType_t xTicksToWait = 500U;
SERIAL.println("Thread B: Started");
while(1){
distance=s_sensor();
xStatus = xQueueReceive(xQueue, &ReceivedValue, xTicksToWait);
//Serial.println("check if data is received");
if(xStatus == pdPASS) // receive error check
{
Serial.print("received data : ");
Serial.println(ReceivedValue);
}
else{
Serial.println("No data available");
}
/*
{
if(uxQueueMessagesWaiting(xQueue) != 0)
{
while(1)
{
Serial.println("rtos queue receive error, stopped");
delay(1000);
}
}
}
*/
//SERIAL.println("B");
SERIAL.flush();
myDelayMs(500);
}
}
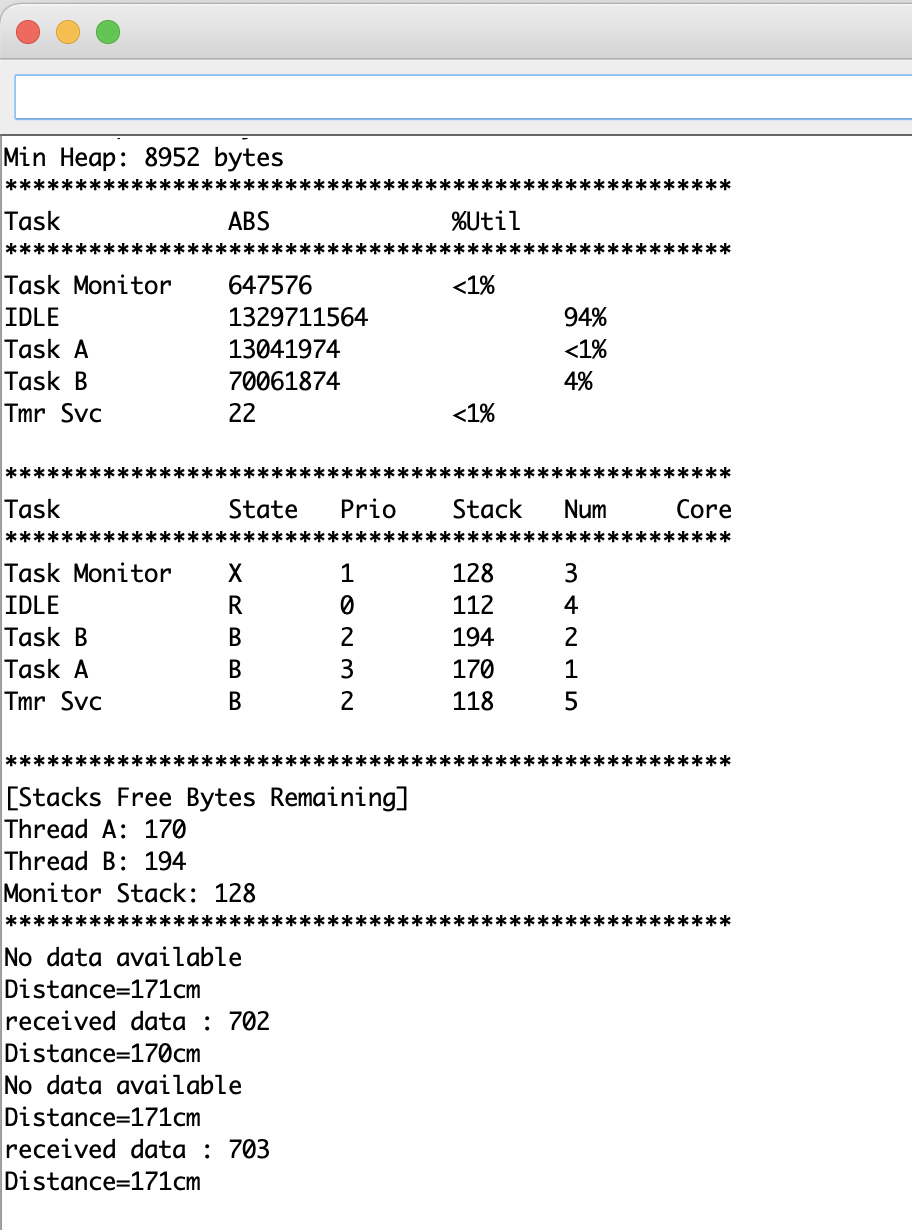
動作させると以下のシリアルポート出力になります。queueに存在しなければ存在しないよと出力してます。既にthreadAとthreadBでwebサーバーと距離センサー機能の呼び出しをおこなっているので、実用的なマルチタスクに一歩前進。
モニタータスクはリソースの解放忘れなどのチェック用に開発期間中は削除できないでしょう。
{kind=link}
admin