
FreeRTOSの基本構造の理解のために、サンプルを素材にして色々いじってみることにします。
以下は
FreeRTOS_SAMD21のライブラリ中に含まれるサンプルプログラム(Basic_RTOS_Example)のソースコード全てです。
① タスクの定義
27~29行目でグローバル変数でタスク定義をしています。
TaskHandle_t Handle_aTask;
TaskHandle_t Handle_bTask;
TaskHandle_t Handle_monitorTask;
② タスクの記述
例えば、57行目で以下のような書式で定義しますが、なぜstaticなのかは今の段階では不明。タスク生成にxTaskCreateStatic()メソッドがあるから関連ありそうですが、xTaskCreateメソッドでStaticのあるなしでタスクスタック領域の確保の仕方が変わるようなので、一般的にはstaticにすることでタスクでも何らかのリソース割り当て方法が変わってくるはず。
static void threadA( void *pvParameters )
③ タスクの作成と起動
200~202行目のvoid setup()関数中で作成して205行目で起動しています。
xTaskCreate(threadA, “Task A”, 256, NULL, tskIDLE_PRIORITY + 3, &Handle_aTask);
xTaskCreate(threadB, “Task B”, 256, NULL, tskIDLE_PRIORITY + 2, &Handle_bTask);
xTaskCreate(taskMonitor, “Task Monitor”, 256, NULL, tskIDLE_PRIORITY + 1, &Handle_monitorTask);
205行目
vTaskStartScheduler();
④ タスクの終了
自分自身を終了させるときは、nullを引数に指定してvTaskDelete()を呼び出し。(71行目)
SERIAL.println(“Thread A: Deleting”);
vTaskDelete( NULL );
他のタスクを終了させるときには、例えば
vTaskDelete( Handle_bTask );
のように、タスク定義で使用したグローバル変数名を使います。
//**************************************************************************
// FreeRtos on Samd21
// By Scott Briscoe
//
// Project is a simple example of how to get FreeRtos running on a SamD21 processor
// Project can be used as a template to build your projects off of as well
//
//**************************************************************************
#include
//**************************************************************************
// Type Defines and Constants
//**************************************************************************
#define ERROR_LED_PIN 13 //Led Pin: Typical Arduino Board
//#define ERROR_LED_PIN 2 //Led Pin: samd21 xplained board
#define ERROR_LED_LIGHTUP_STATE HIGH // the state that makes the led light up on your board, either low or high
// Select the serial port the project should use and communicate over
// Some boards use SerialUSB, some use Serial
#define SERIAL SerialUSB //Sparkfun Samd21 Boards
//#define SERIAL Serial //Adafruit, other Samd21 Boards
//**************************************************************************
// global variables
//**************************************************************************
TaskHandle_t Handle_aTask;
TaskHandle_t Handle_bTask;
TaskHandle_t Handle_monitorTask;
//**************************************************************************
// Can use these function for RTOS delays
// Takes into account processor speed
// Use these instead of delay(...) in rtos tasks
//**************************************************************************
void myDelayUs(int us)
{
vTaskDelay( us / portTICK_PERIOD_US );
}
void myDelayMs(int ms)
{
vTaskDelay( (ms * 1000) / portTICK_PERIOD_US );
}
void myDelayMsUntil(TickType_t *previousWakeTime, int ms)
{
vTaskDelayUntil( previousWakeTime, (ms * 1000) / portTICK_PERIOD_US );
}
//*****************************************************************
// Create a thread that prints out A to the screen every two seconds
// this task will delete its self after printing out afew messages
//*****************************************************************
static void threadA( void *pvParameters )
{
SERIAL.println("Thread A: Started");
for(int x=0; x<100; ++x)
{
SERIAL.print("A");
SERIAL.flush();
myDelayMs(500);
}
// delete ourselves.
// Have to call this or the system crashes when you reach the end bracket and then get scheduled.
SERIAL.println("Thread A: Deleting");
vTaskDelete( NULL );
}
//*****************************************************************
// Create a thread that prints out B to the screen every second
// this task will run forever
//*****************************************************************
static void threadB( void *pvParameters )
{
SERIAL.println("Thread B: Started");
while(1)
{
SERIAL.println("B");
SERIAL.flush();
myDelayMs(2000);
}
}
//*****************************************************************
// Task will periodically print out useful information about the tasks running
// Is a useful tool to help figure out stack sizes being used
// Run time stats are generated from all task timing collected since startup
// No easy way yet to clear the run time stats yet
//*****************************************************************
static char ptrTaskList[400]; //temporary string buffer for task stats
void taskMonitor(void *pvParameters)
{
int x;
int measurement;
SERIAL.println("Task Monitor: Started");
// run this task afew times before exiting forever
while(1)
{
myDelayMs(10000); // print every 10 seconds
SERIAL.flush();
SERIAL.println("");
SERIAL.println("****************************************************");
SERIAL.print("Free Heap: ");
SERIAL.print(xPortGetFreeHeapSize());
SERIAL.println(" bytes");
SERIAL.print("Min Heap: ");
SERIAL.print(xPortGetMinimumEverFreeHeapSize());
SERIAL.println(" bytes");
SERIAL.flush();
SERIAL.println("****************************************************");
SERIAL.println("Task ABS %Util");
SERIAL.println("****************************************************");
vTaskGetRunTimeStats(ptrTaskList); //save stats to char array
SERIAL.println(ptrTaskList); //prints out already formatted stats
SERIAL.flush();
SERIAL.println("****************************************************");
SERIAL.println("Task State Prio Stack Num Core" );
SERIAL.println("****************************************************");
vTaskList(ptrTaskList); //save stats to char array
SERIAL.println(ptrTaskList); //prints out already formatted stats
SERIAL.flush();
SERIAL.println("****************************************************");
SERIAL.println("[Stacks Free Bytes Remaining] ");
measurement = uxTaskGetStackHighWaterMark( Handle_aTask );
SERIAL.print("Thread A: ");
SERIAL.println(measurement);
measurement = uxTaskGetStackHighWaterMark( Handle_bTask );
SERIAL.print("Thread B: ");
SERIAL.println(measurement);
measurement = uxTaskGetStackHighWaterMark( Handle_monitorTask );
SERIAL.print("Monitor Stack: ");
SERIAL.println(measurement);
SERIAL.println("****************************************************");
SERIAL.flush();
}
// delete ourselves.
// Have to call this or the system crashes when you reach the end bracket and then get scheduled.
SERIAL.println("Task Monitor: Deleting");
vTaskDelete( NULL );
}
//*****************************************************************
void setup()
{
SERIAL.begin(115200);
delay(1000); // prevents usb driver crash on startup, do not omit this
while (!SERIAL) ; // Wait for serial terminal to open port before starting program
SERIAL.println("");
SERIAL.println("******************************");
SERIAL.println(" Program start ");
SERIAL.println("******************************");
SERIAL.flush();
// Set the led the rtos will blink when we have a fatal rtos error
// RTOS also Needs to know if high/low is the state that turns on the led.
// Error Blink Codes:
// 3 blinks - Fatal Rtos Error, something bad happened. Think really hard about what you just changed.
// 2 blinks - Malloc Failed, Happens when you couldn't create a rtos object.
// Probably ran out of heap.
// 1 blink - Stack overflow, Task needs more bytes defined for its stack!
// Use the taskMonitor thread to help gauge how much more you need
vSetErrorLed(ERROR_LED_PIN, ERROR_LED_LIGHTUP_STATE);
// sets the serial port to print errors to when the rtos crashes
// if this is not set, serial information is not printed by default
vSetErrorSerial(&SERIAL);
// Create the threads that will be managed by the rtos
// Sets the stack size and priority of each task
// Also initializes a handler pointer to each task, which are important to communicate with and retrieve info from tasks
xTaskCreate(threadA, "Task A", 256, NULL, tskIDLE_PRIORITY + 3, &Handle_aTask);
xTaskCreate(threadB, "Task B", 256, NULL, tskIDLE_PRIORITY + 2, &Handle_bTask);
xTaskCreate(taskMonitor, "Task Monitor", 256, NULL, tskIDLE_PRIORITY + 1, &Handle_monitorTask);
// Start the RTOS, this function will never return and will schedule the tasks.
vTaskStartScheduler();
// error scheduler failed to start
// should never get here
while(1)
{
SERIAL.println("Scheduler Failed! \n");
SERIAL.flush();
delay(1000);
}
}
//*****************************************************************
// This is now the rtos idle loop
// No rtos blocking functions allowed!
//*****************************************************************
void loop()
{
// Optional commands, can comment/uncomment below
SERIAL.print("."); //print out dots in terminal, we only do this when the RTOS is in the idle state
SERIAL.flush();
delay(100); //delay is interrupt friendly, unlike vNopDelayMS
}
//*****************************************************************
動作させてみた写真は以下の通りです。既にthreadAは終了してしまってます。スタック領域が枯渇しているので、リソース解放抜けがありそうです。
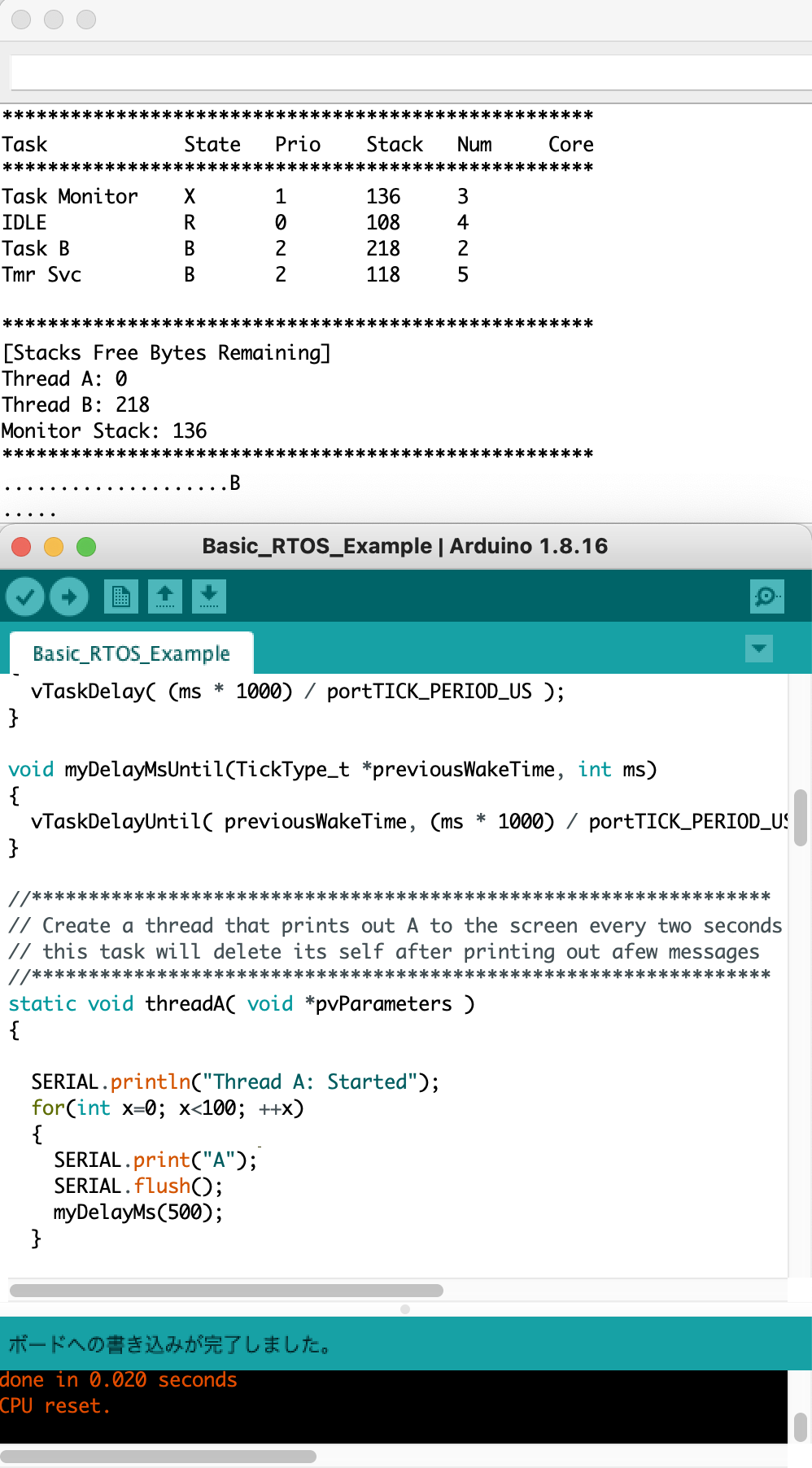
まだいくつか必須の機能はありますが追々と確認していきます。
FreeRTOSのAPIドキュメントはこちらから。
https://www.freertos.org/a00106.html
admin