中身はラズピコのDebug Probeを使ってみる、もう一枚ラズピコでファームインストでも良いけど、かさばらないでスマートだから専用品の方が良い
Debug Probeの公式ページは、
https://www.raspberrypi.com/documentation/microcontrollers/debug-probe.html
<動作環境>
M1 MacBook Air/Arduino IDE 2.3.3
USBケーブルはswdの場合にはどちらもダウンロードはデバッガ経由なのでターゲットは電源供給だけで問題ないそうです、実際にはどちらからのダウンロードも使うから最初からデータ転送できるケーヌルにしとけば良いと思いますが、macからの見え方は、
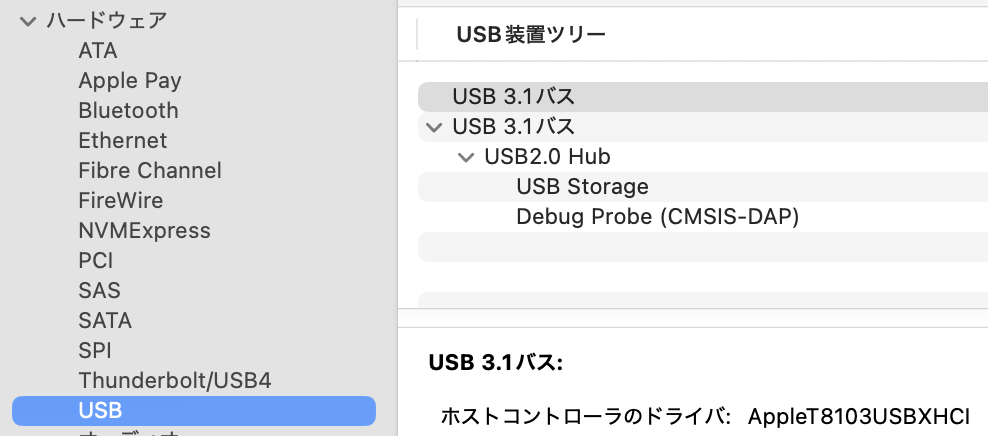
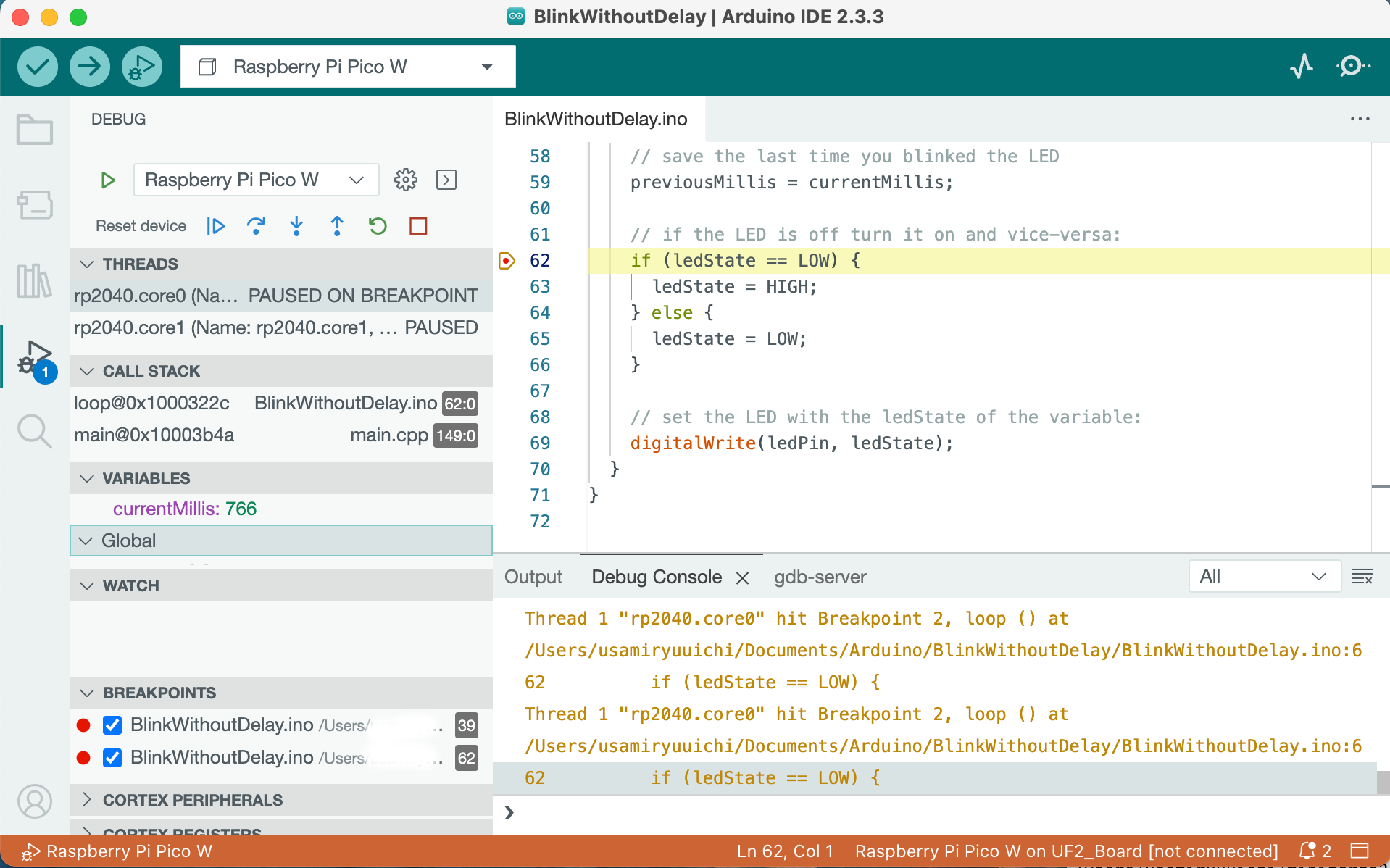
Arduino IDEのToolsの設定は、デバッガーポートが認識されている状態では以下のような選択と見え方です

![]()
一点ハマったのは、デバッグ用のglobeボードの捺印のあるコネクタにswd信号はつながっていない事、wでない普通のボードはつながっているのかもしれないけど(ケーブルの色はオレンジ:SWCLK、黒:GND、黄色:SWDIOに対応してます)
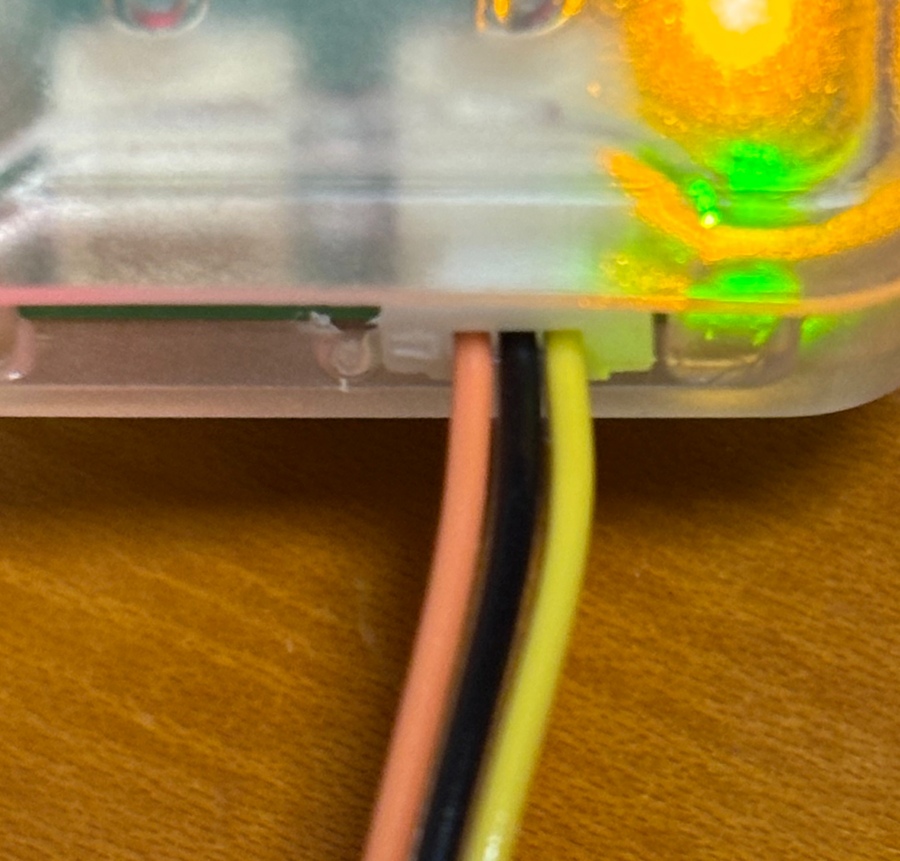
でPCB上のviaにピン立てて受けにしてケーブル接続
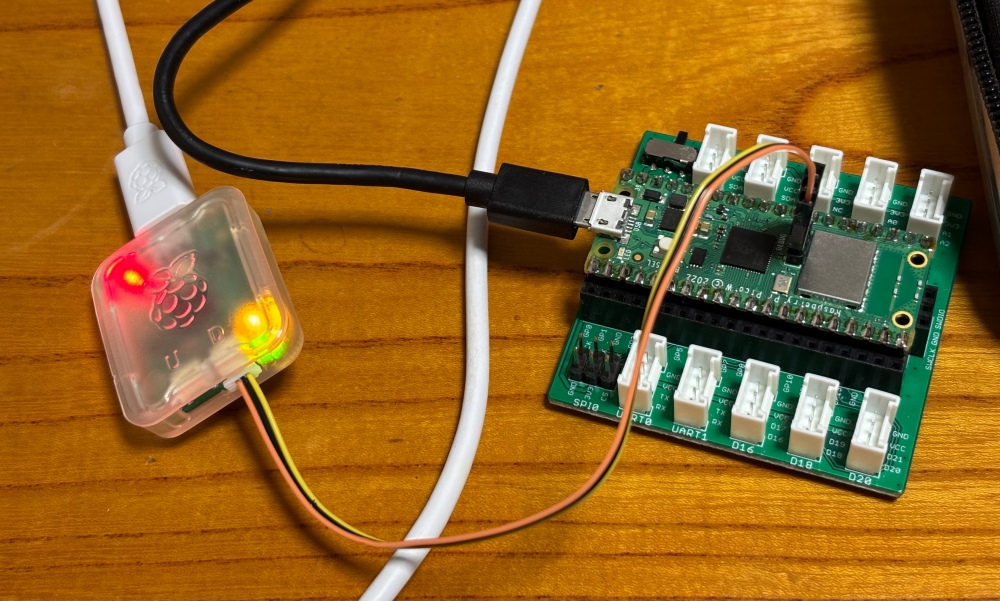
swdインターフェースがアクティブならば、オレンジと黄色のledが点灯状態になって、Arduino IDEのデバッグも機能します
P.S. 2024/12/1
デバッガーのswdコネクタの半抜け注意
何故か急に繋がらないなと思ったら、コネクタが半抜け状態、この状態では最初にorange/yellow ledが点灯してすぐに消える(エラーになる)
奥まで押し込んだら回復、
<追記:2024/12/24>
デバッグできない(一度止めるとエラー出た)ので、何かと調べるとシリアルポートの設定をこのようにしないといけなかった
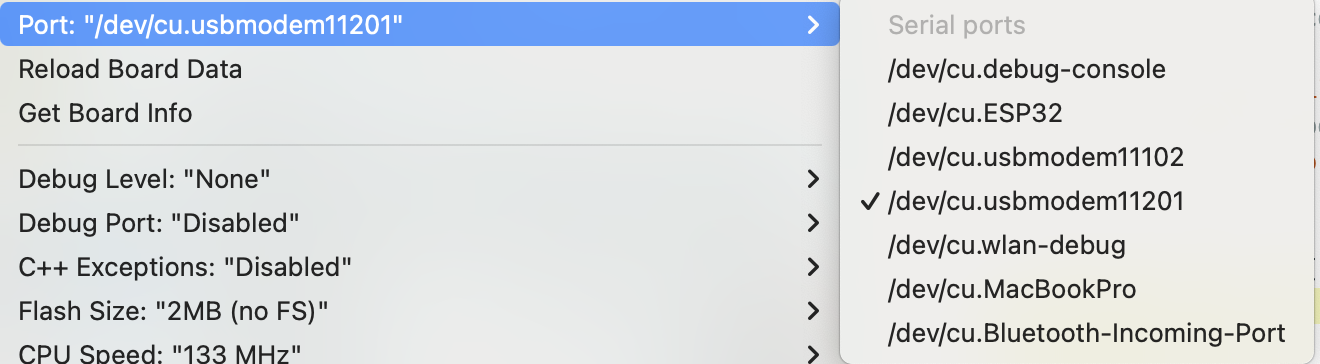
% ls /dev/cu.*
/dev/cu.Bluetooth-Incoming-Port /dev/cu.usbmodem11102
/dev/cu.ESP32 /dev/cu.usbmodem11201となっているから、デバッグ用にシリアルポートは正しく設定しましょう、このポートはmacのリブートなどで変わるんだろうね
admin