変換基板届いたので、早速動かしてみた。一番の懸念はアナログ方式ならば、概ねどのサーボモーターでも扱えるのかということ。
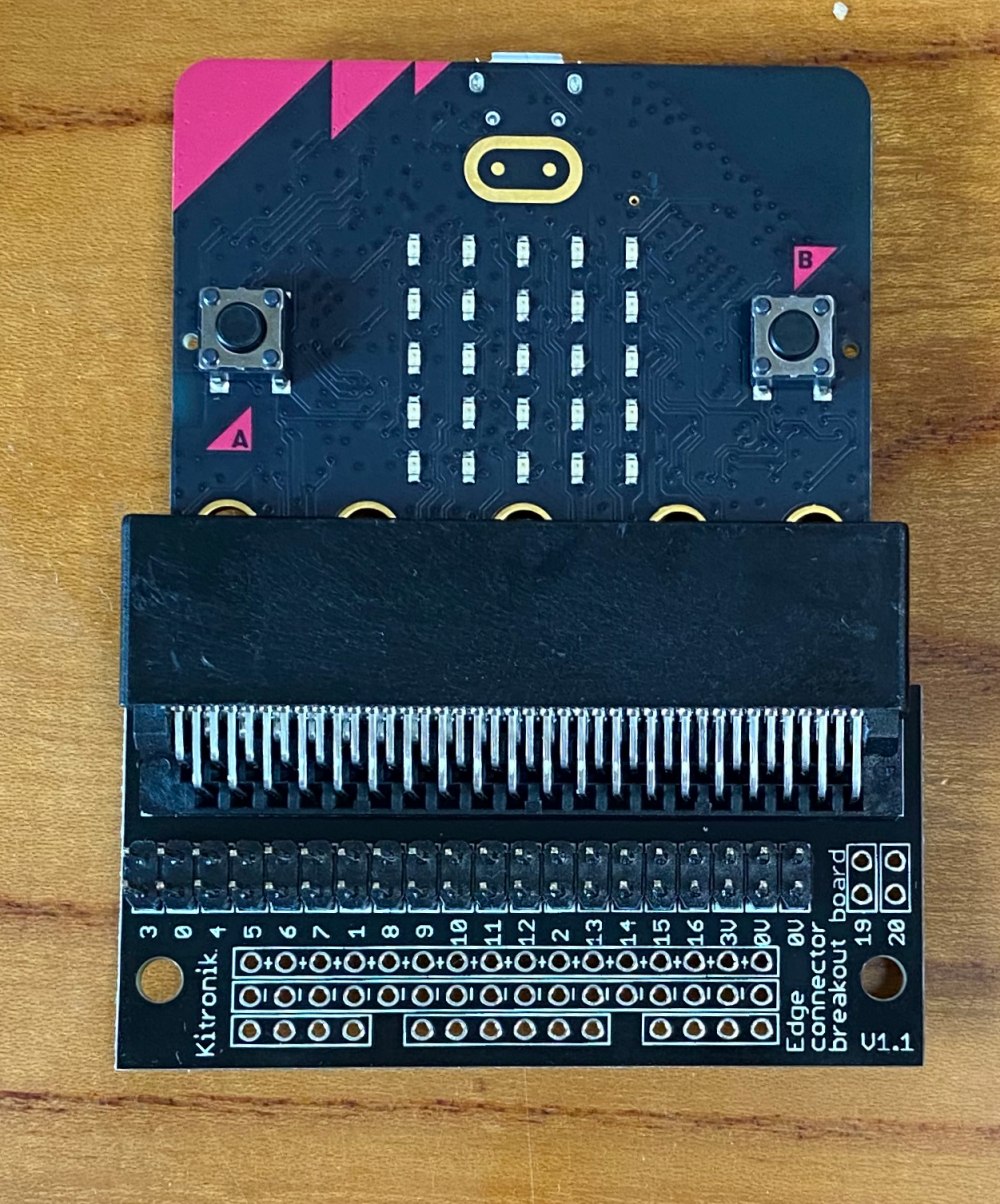
変換ボードはこんな形、緑色の樹脂は端を捲れば除去できます。

micro:bitはおそらくどちらの面でも挿入できるでしょうが、スイッチサイエンスの写真を参考に以下のように、タッチセンサーが見える面を以下のように挿入しました。端子の並び考えれば、自ずとそうなりますが、おそらく逆向きでも壊れることのないような端子配列にはなっているでしょう、やっては見ませんが。
https://isehara-3lv.sakura.ne.jp/blog/2022/01/28/サーボモーターの動作確認m5stack-gray/
ここで使ったサーボモーターに制御信号だけつないで動かしてみた。
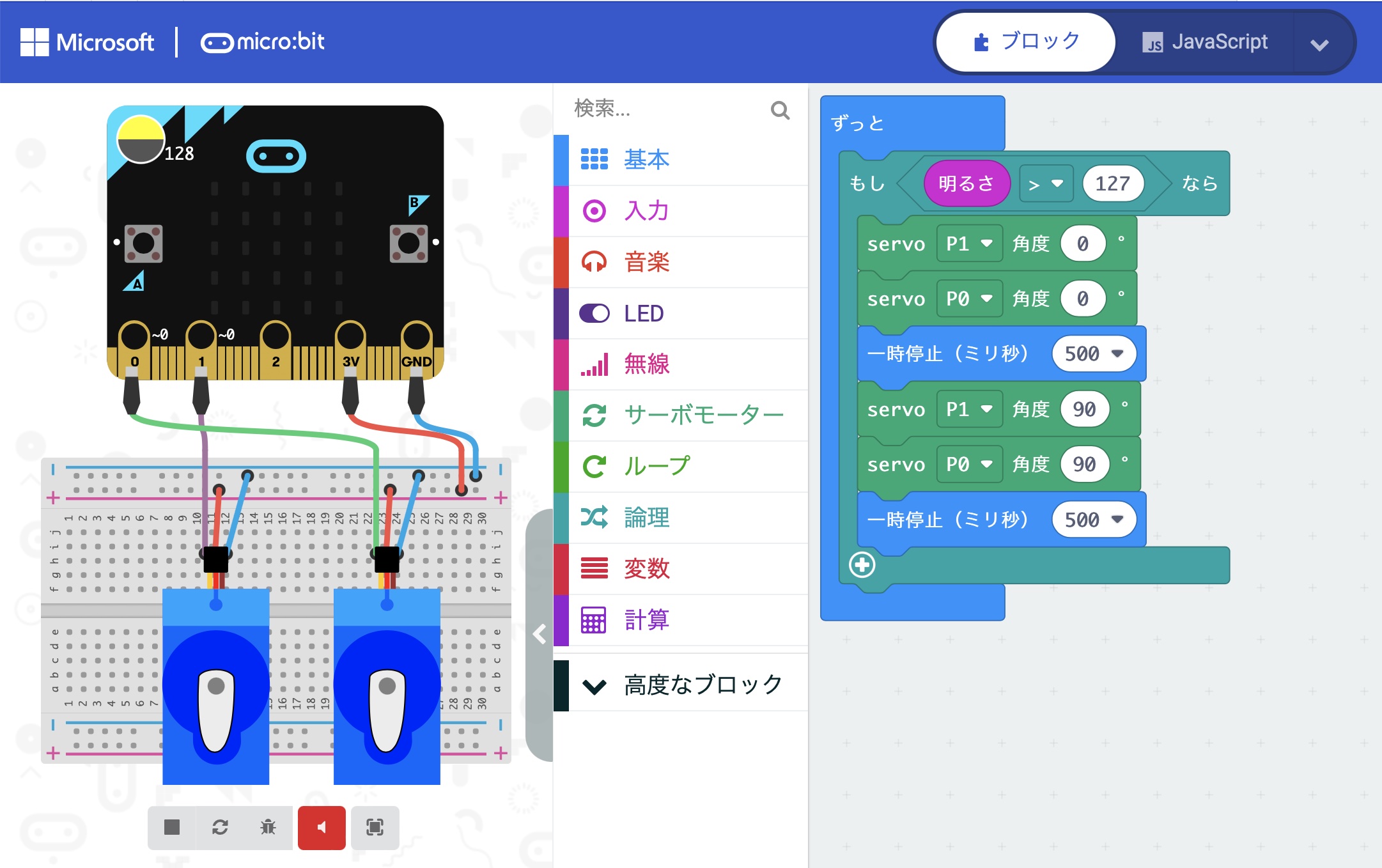
ブロックコードは以下のリンクになります。タッチセンサー、環境音センスもしくは照度センサーのオア条件でモーターを起動しています。
https://github.com/chateight/servo_motor
動作している動画は、
このように、非常にあっけなく動かすことができます。
admin