以下の記事で、Intel MacとM1 Macでビルド時間が違うことに気づいたので、条件を同じにして比較。
https://isehara-3lv.sakura.ne.jp/blog/2023/04/23/dockerコンテナからイメージを作成する/
<時間計測の条件>
一度ビルドを完了した状態で、実行ファイルを削除して再度ビルドに要する時間を計測(実際行っていることはリンケージですね)
スクリプトファイルで、
% go build main.go
の前後のタイムスタンプで計測
M1 Mac native build time -> 2 seconds
% ./build.sh
2023年 4月24日 月曜日 13時12分41秒 JST
2023年 4月24日 月曜日 13時12分43秒 JST
M1 Mac Docker container build time -> 11 seconds
# ./build.sh
Mon Apr 24 05:00:53 BST 2023
Mon Apr 24 05:01:04 BST 2023
Intel mac Docker container build time -> 61 seconds
# ./build.sh
Mon Apr 24 04:18:53 BST 2023
Mon Apr 24 04:19:54 BST 2023
Raspberry Pi model B+ native build time -> 118 seconds
$ ./build.sh
Mon 24 Apr 13:05:53 JST 2023
Mon 24 Apr 13:07:51 JST 2023
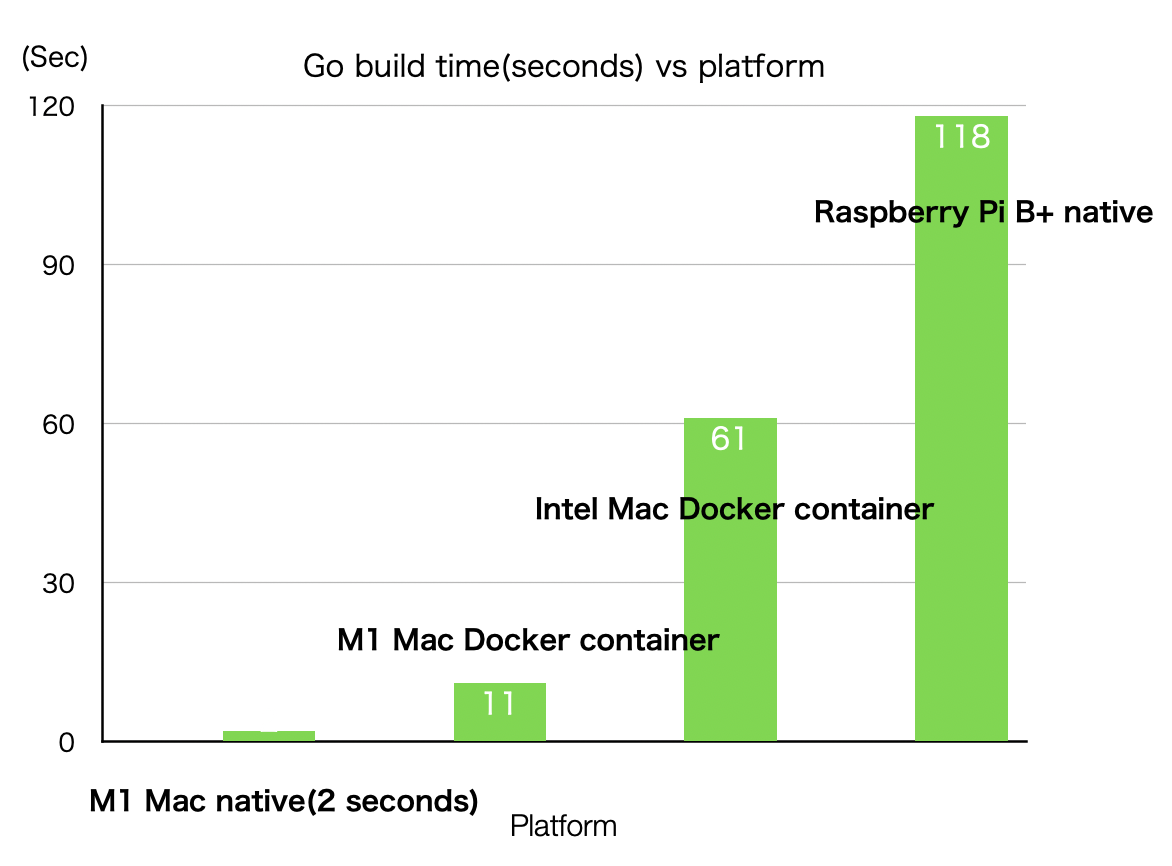
Intel/M1 Macは他のタスクではほぼ同じパーフォーマンスなので、Intel CPUではarm CPUのエミュレーションが明らかに速度が遅いようで、M1 MacでのDockerだけがクロスビルドの許容内、規模にもよりますが。
admin