Thonny、Arduino IDEで環境作ってみて、おそらく現状主要な3つの選択肢だろうと思う最後の選択肢になりますが、VScodeでPlatformIO使ってみます。
以下のリンクでPico Wも含めたセットアップ手順が記載されているのでほぼそのままです。
https://logikara.blog/raspi-pico-init/
PIO homeで新しいプロジェクトを設定して、ボードにPicoを選択後にplatformiio.iniにPico Wの設定を書き込みます。
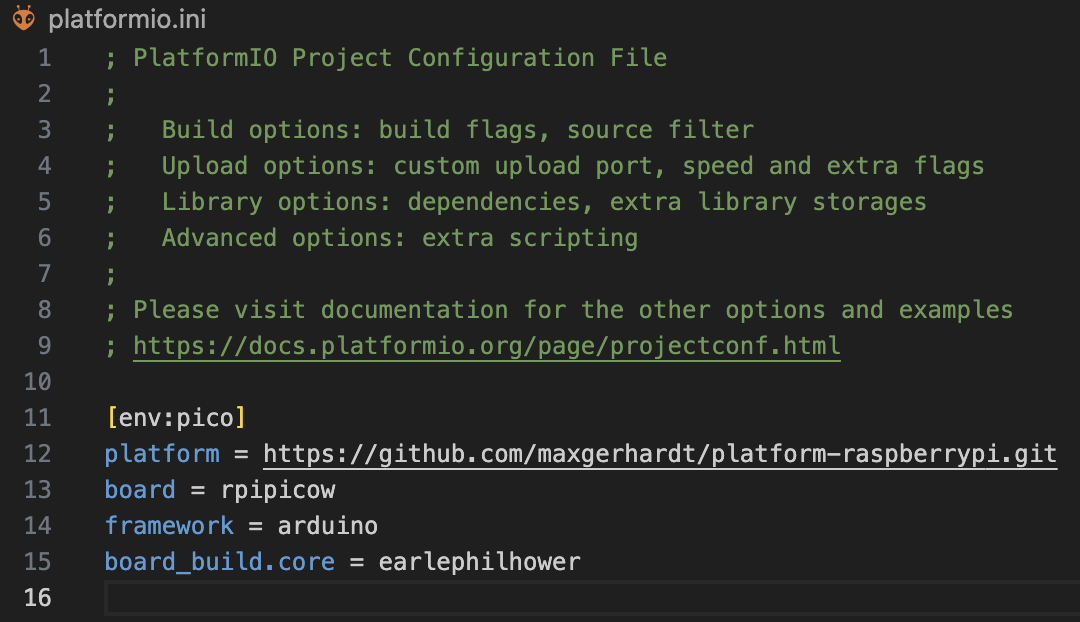
platformio.iniファイルが変更されるとその内容に従って、必要なモジュールの読み込みが開始されてPlatformIOの領域にクローンが開始され、しばらく待つと完了。
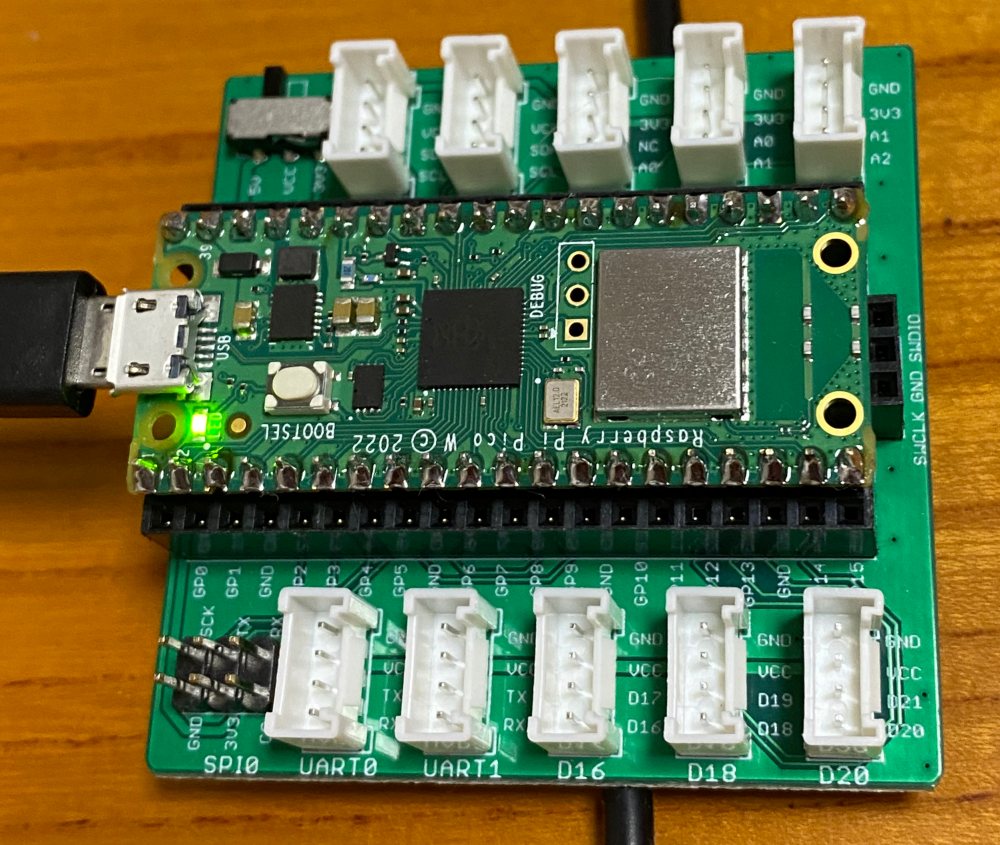
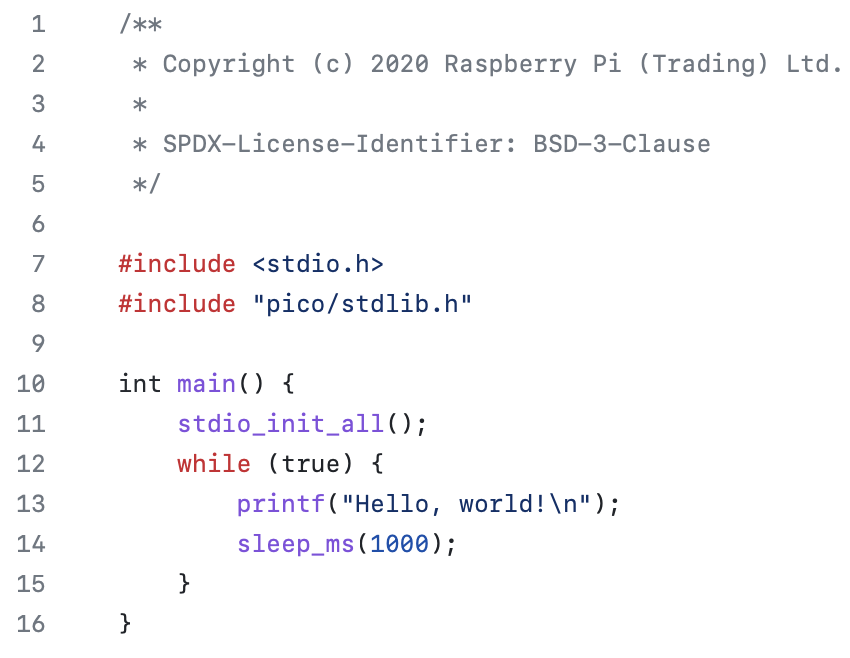
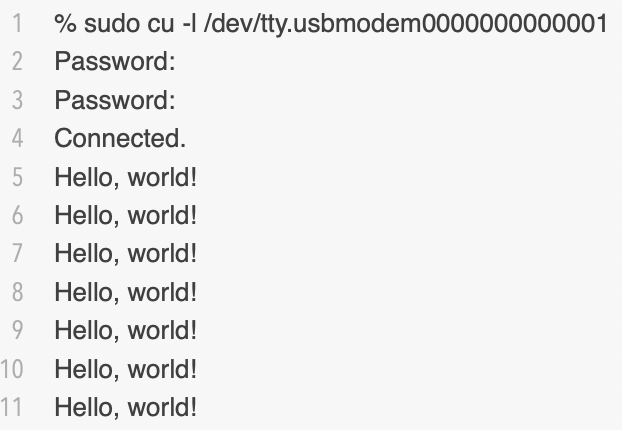
後は通例通り、srcディレクトリのmain.cppにLチカコードを入力して、Pico Wが外部ファイルに見える状態で転送、転送完了するとPico Wが切り離されてプログラムが動作開始します。実は外部ファイルモードにしていなくとも、VScodeが外部ファイルモードにしてUSBシリアルでファイル転送をして、再度外部ファイルモードを終了するという一連の操作を自動で行なってくれるのでこれは便利です。
特にArduino言語で差し障りなければ、VScode + PlatformIOが一番素直であるように思います。
admin