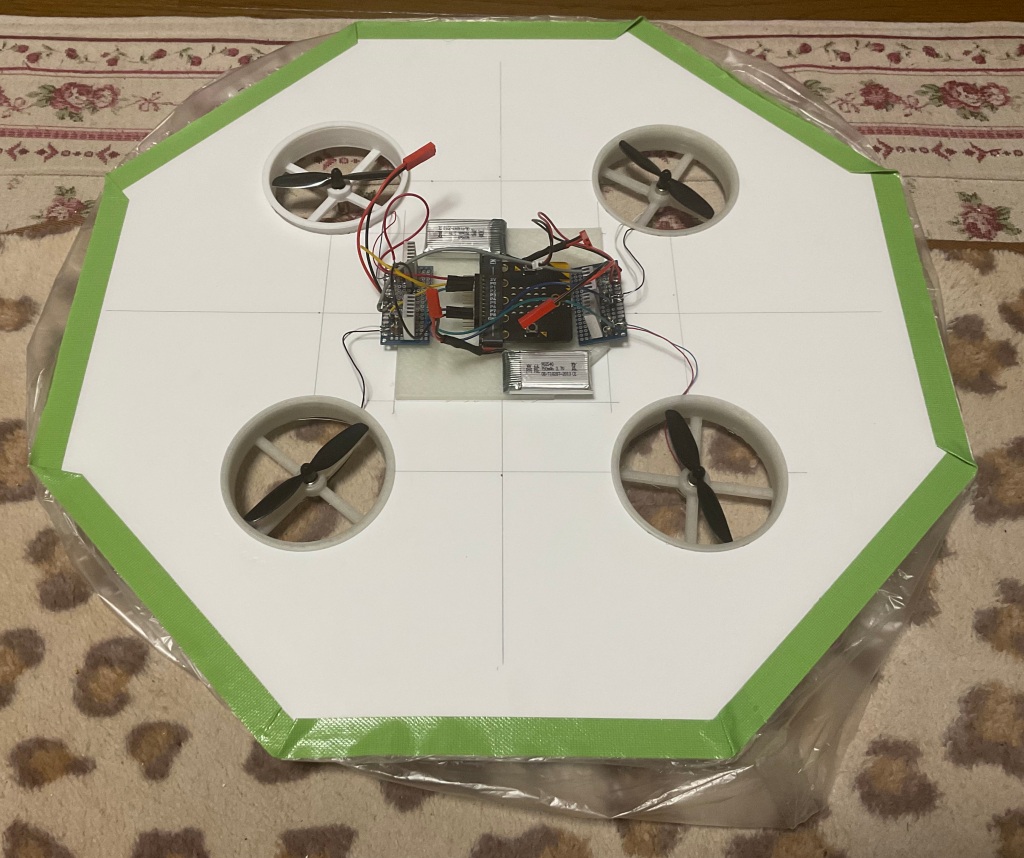
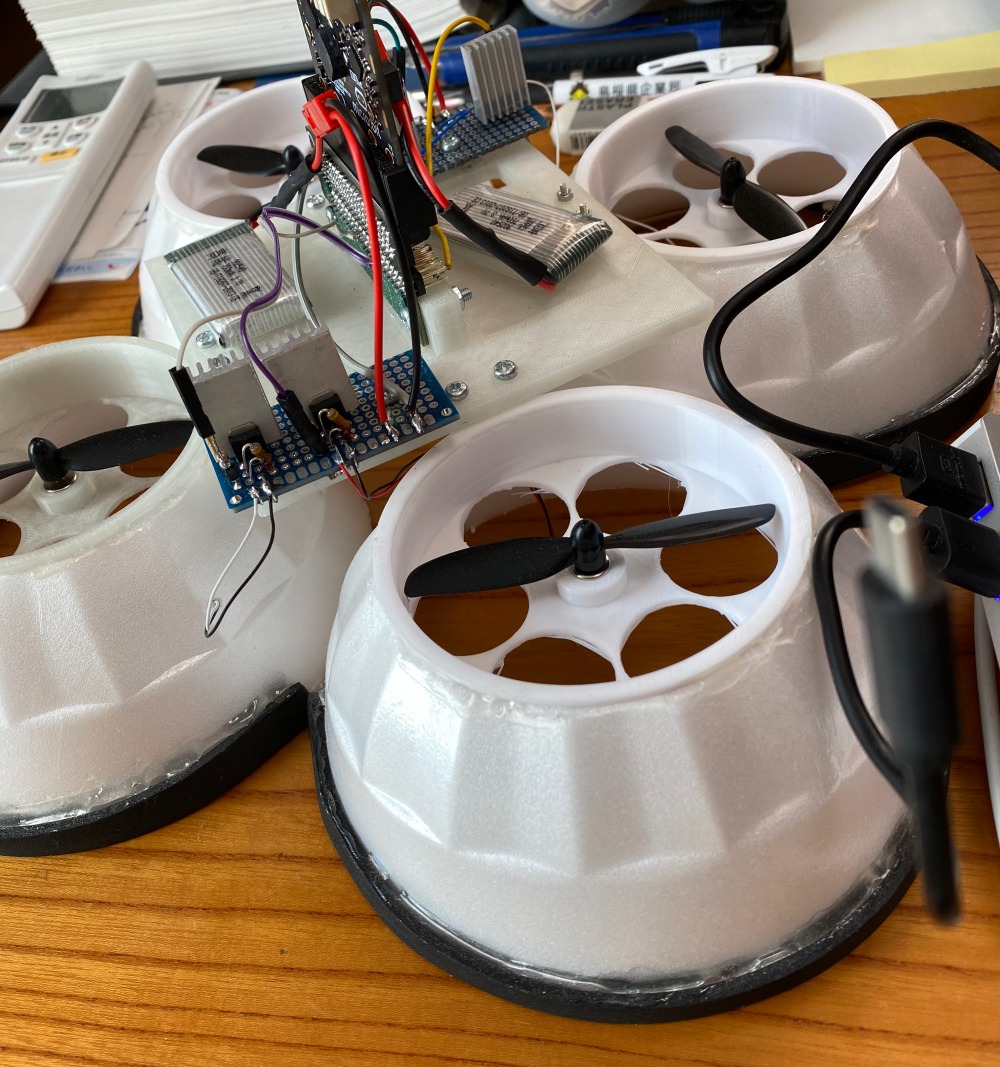
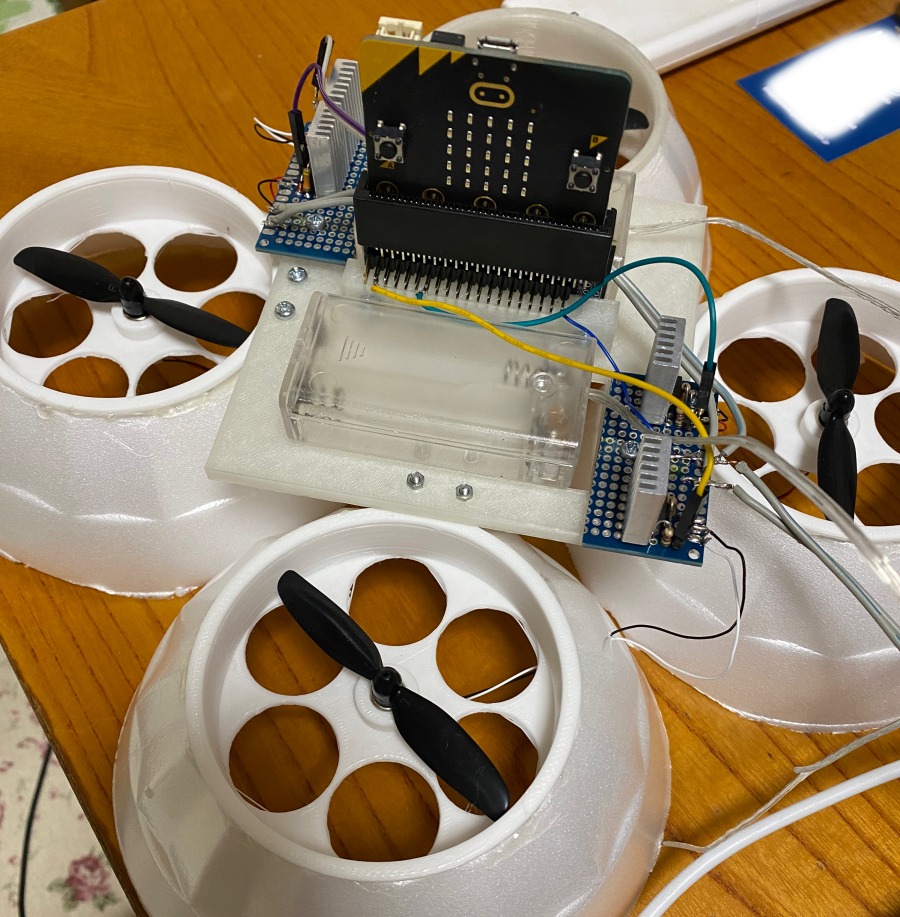
3Dプリンタの熱にも耐えられる季節になってきたので、ホーバークラフトのアップデートをしてみる
① PLA性は車の中に放置されると軟化してグダグダになるので材料はABSに変更
造形パラメターはチューニングが必要、プラットホームから剥離対策(樹脂押し出し量増やして接地面積大きくする)とラフトとオブジェクトの距離設定が大きくて最初の層の密着が改善用(デフォルトで良いけどPLAだとうまく剥がれないから大きめにしていた)
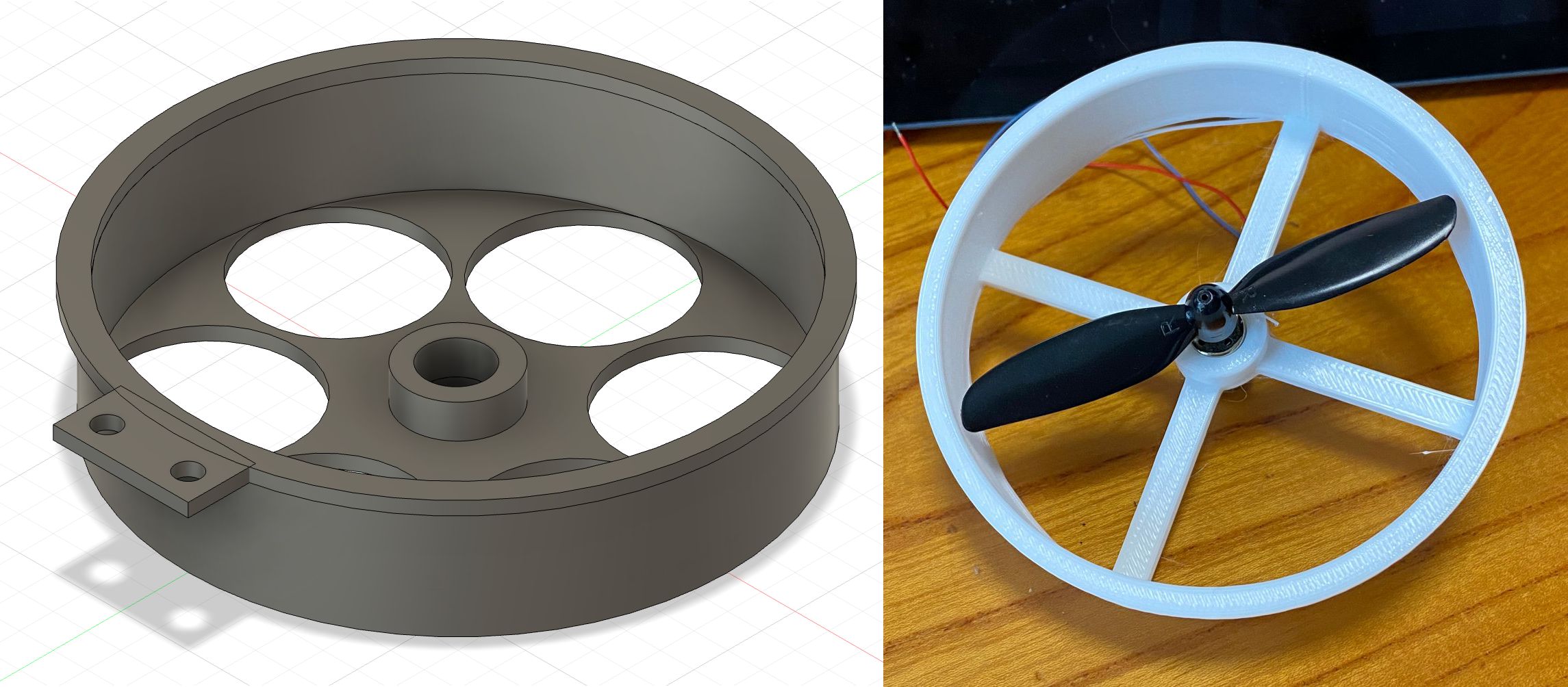
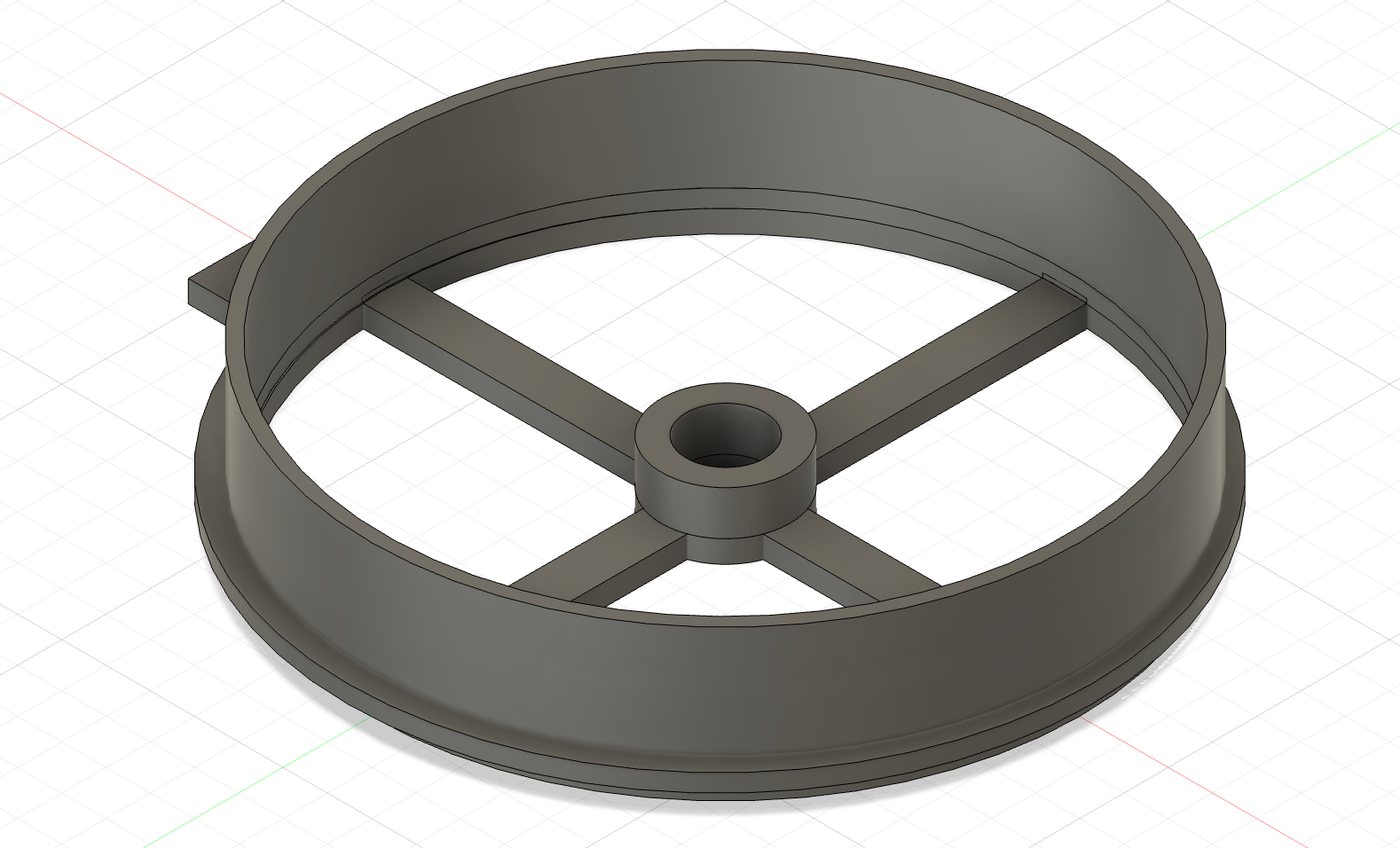
② ファンの位置極めができるようにバンプを追加
裏側から隙間テープで留めて、ファンの水へからの角度を安定させる
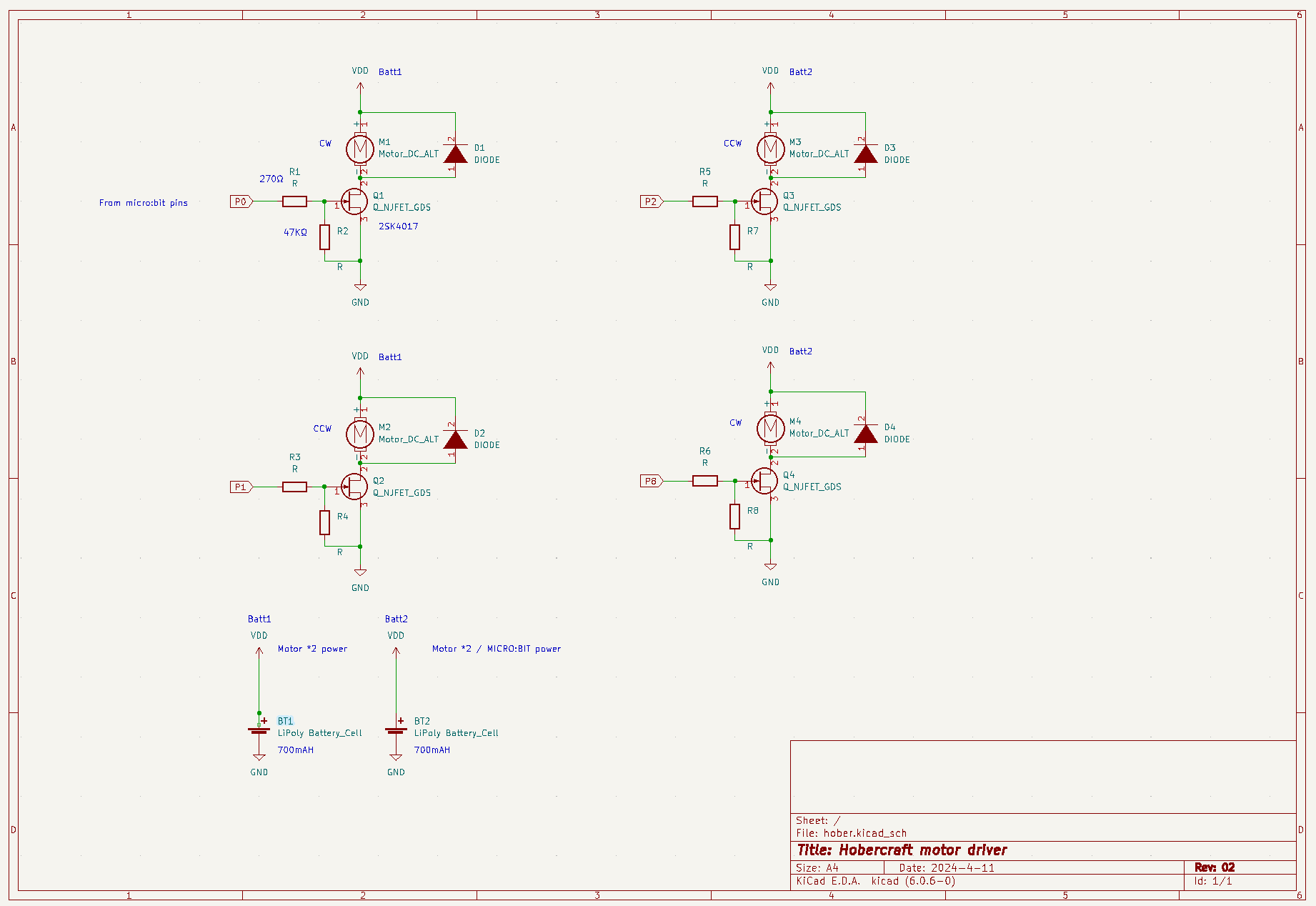
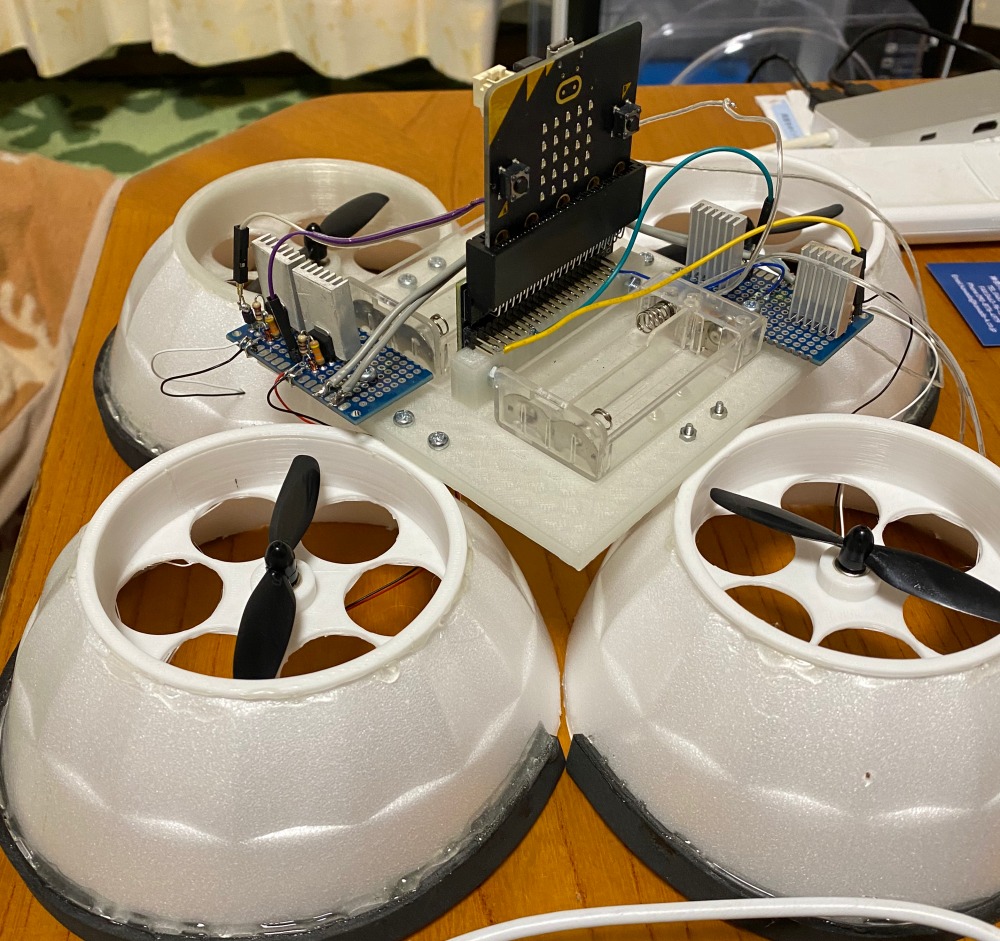
③ 移動方向側のファンの回転数を浮上できる範囲で小さくする
つまり回転数の差を大きくして反対側が持ち上がる量を大きくしてやることで推力を増加してやる


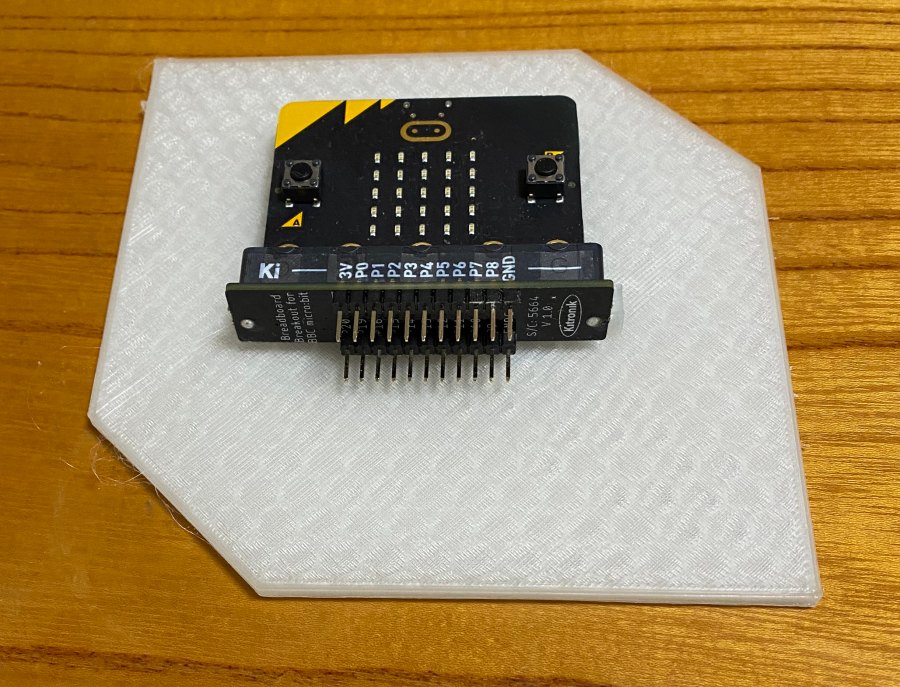
PWM指定で最大値は1024、
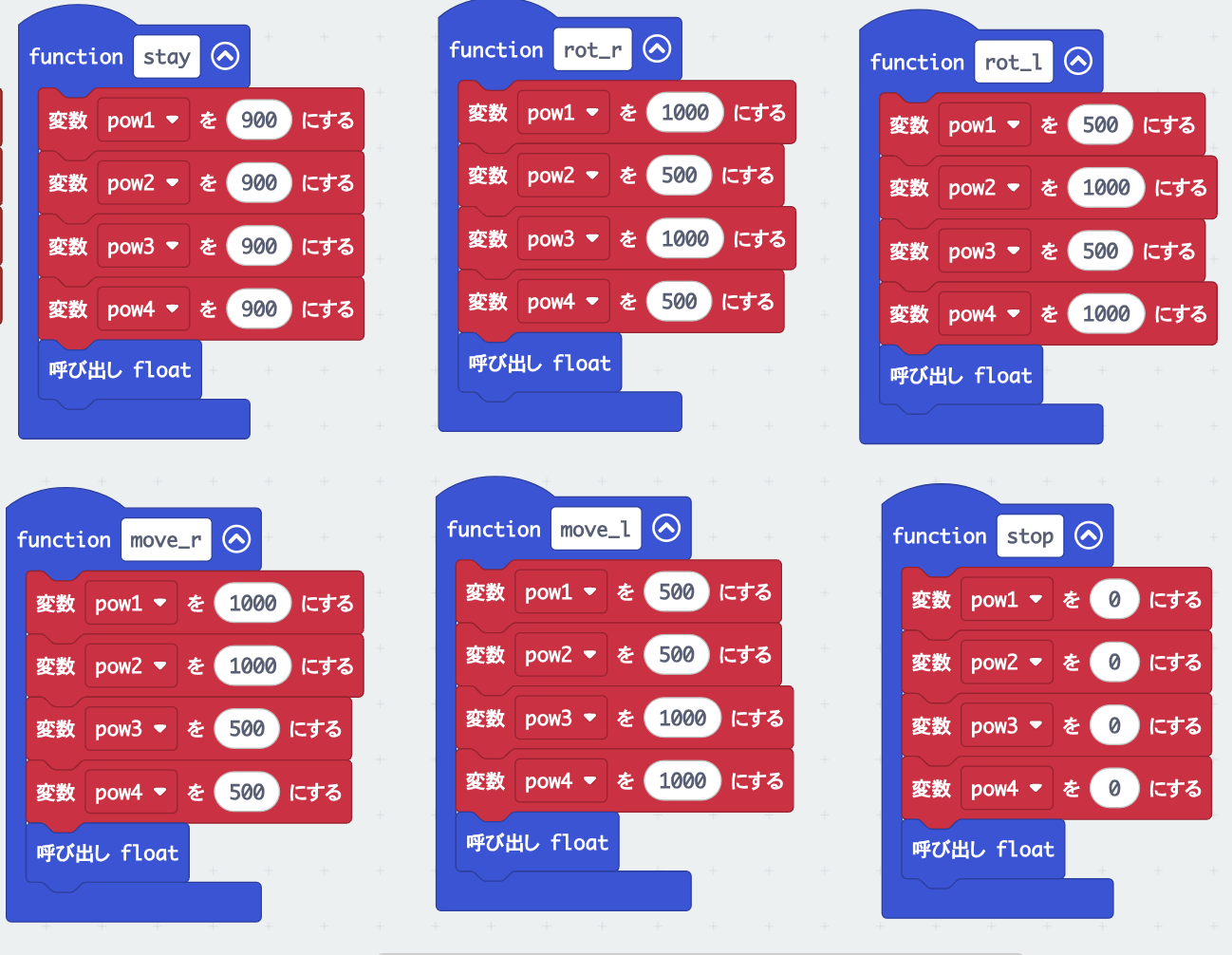
以上で左右(前後)方向の移動はコントロールできるようになった、動画は以下のリンクから
ただし当然の如くドリフトはするから、micro:bitの加速度センサーとジャイロ(コンパス)機能使ってフィードバックして安定したポジションを取るようにするのが次のステップ
admin