たまたまVSCode開いたら、Arduino拡張機能をおすすめされている。
調べてみると、MicroSoftのプラグインは実は裏ではArduino IDEをそのまま使っているらしいけど、Arduino IDEよりもVS Codeの方がエディタとしても使いやすいと思うから移行かな。
admin

la vie libre
たまたまVSCode開いたら、Arduino拡張機能をおすすめされている。
調べてみると、MicroSoftのプラグインは実は裏ではArduino IDEをそのまま使っているらしいけど、Arduino IDEよりもVS Codeの方がエディタとしても使いやすいと思うから移行かな。
admin
以下のリンクの公式ドキュメントによると5.5V、しかしどこかには6V以上という記載もあったので、バッテリー充電制御のICの規格を当たってみる。
https://docs.arduino.cc/static/fc77c3c3c77d69764ba7773df64c99db/ABX00023-datasheet.pdf
使用しているのはBQ24195Lなので仕様を見てみると、
https://www.tij.co.jp/product/jp/BQ24195L
最大定格で17Vだから10V以下なら余裕ということになる。NiHの5直だと初期は7Vぐらいになるから確認のために。
admin
サンプルプログラムの版数チェックで版数上げろと言われるのでアップデート。
処理プログラム自身をArduinoに書き込んで実行します。
手順は以下に記載ありますが、
要はArduinoメニューから、
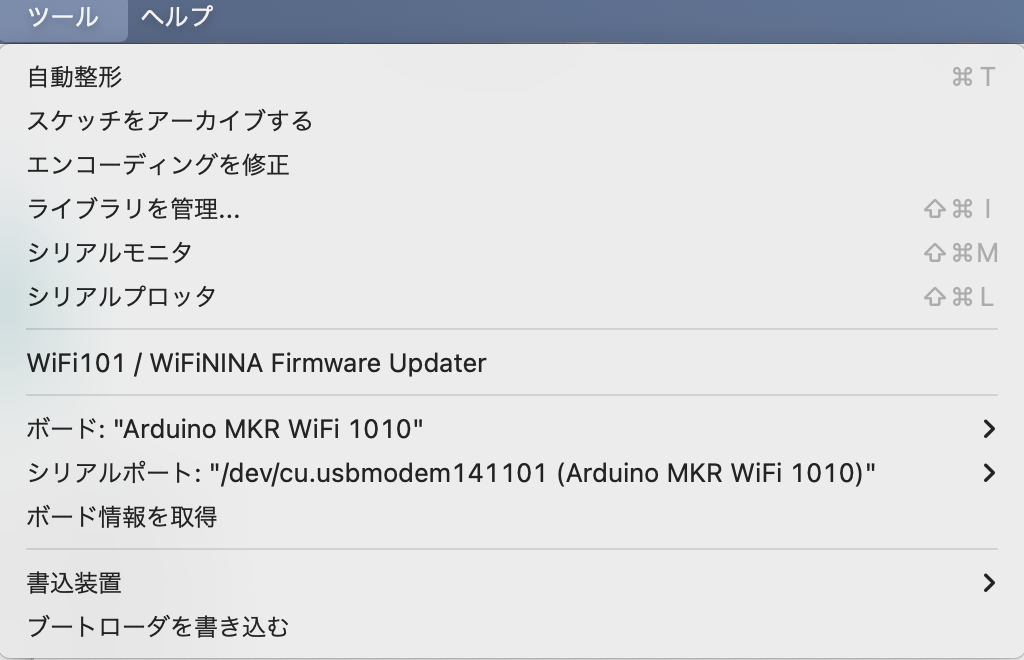
WiFiNINA Firmware Updaterを選択して、
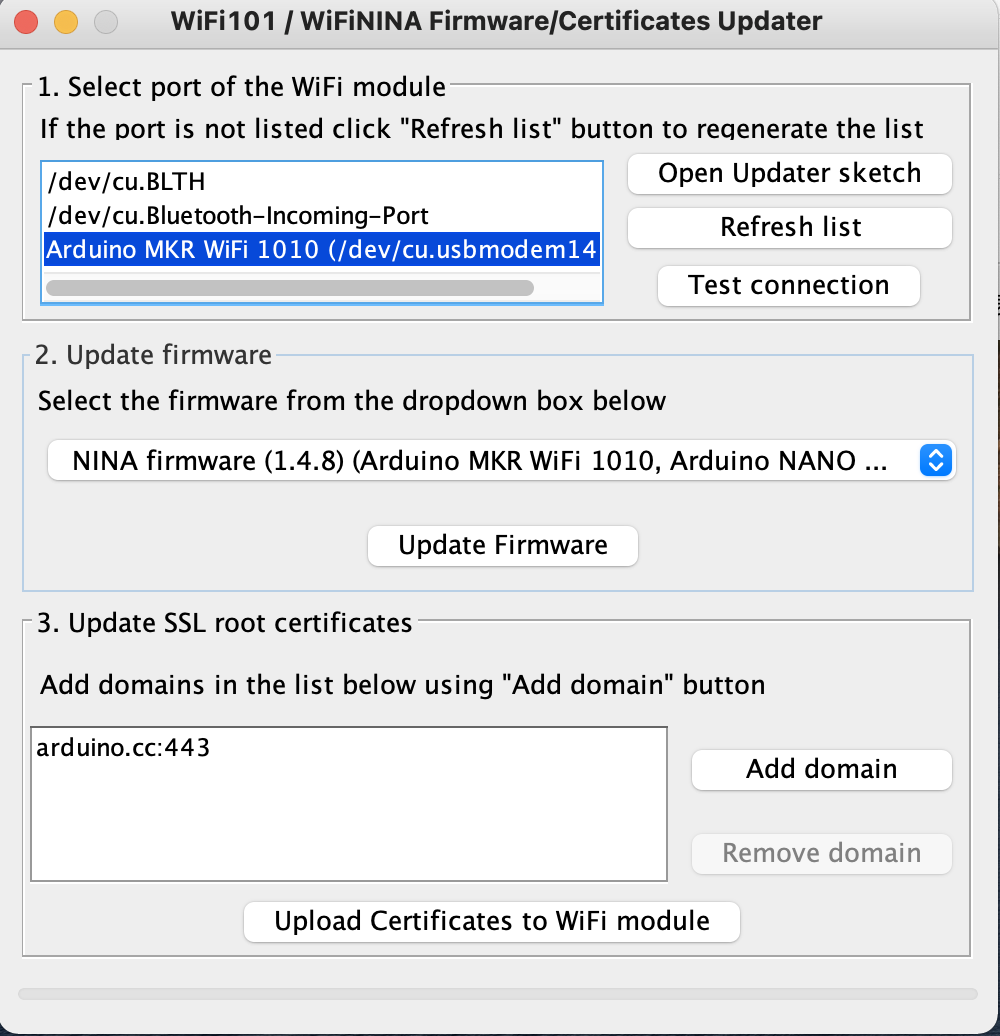
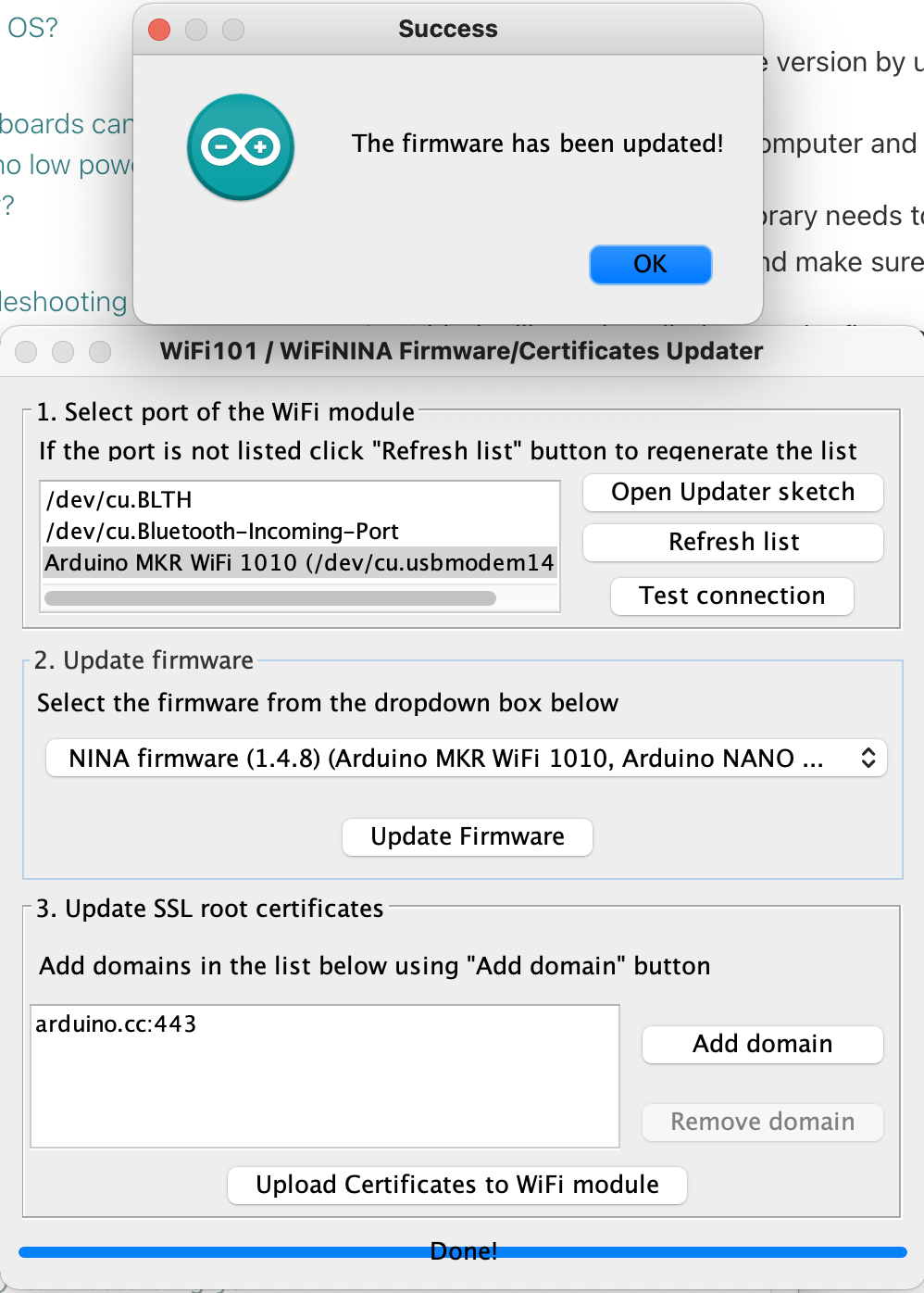
Updaterの指示に従えばうまくいきました。
admin
FreeRTOSでタスクのコントロールとタスク間通信ができれば、当面のやりたい事はできるようになります。
1. タスク遷移図
http://happytech.jp/wordpress/2017/02/25/rtos-for-iot-mcu-task-control/
に分かりやすい図があったので借用。
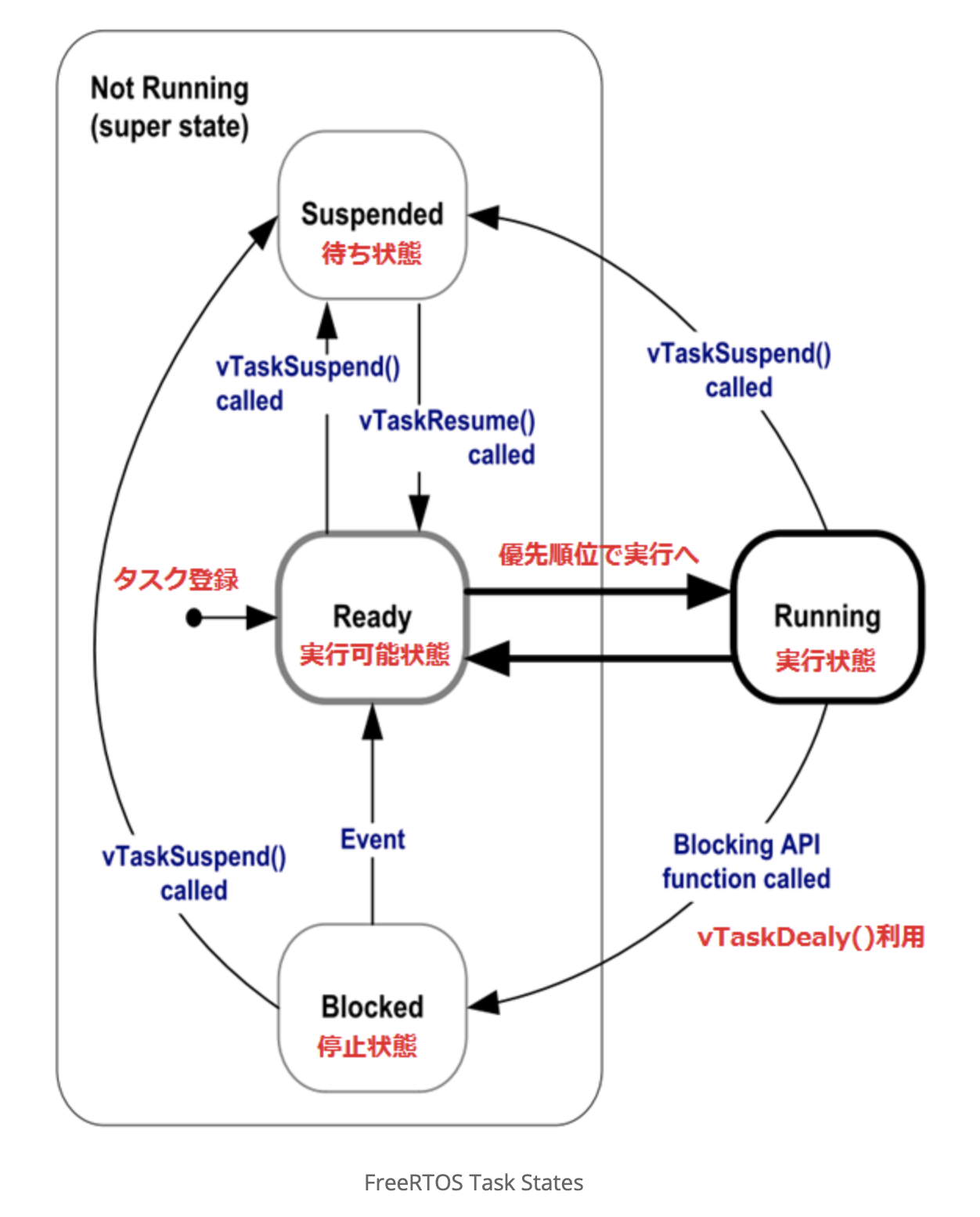
タスク中で時間待ちdelay()させてもタスクは実行権は手放さないので、他のタスクは動作できず、設定した時間だけ停止状態に入るvTaskDelay()関数が必要になります。この場合のEventとはタイムアウトになりますね。
2. タスク間通信
いろんな手法が存在しますが、queueを使うのが一番使いやすそうなので使ってみます。queueとは分かりやすく言えばFIFOです。最も軽量で使えるのはTask Notificationsのようですが、汎用性はqueueのほうがあります。
① queueの作成
1行目のxQueueCreate()でqueueの作成(定義)を行います。
QueueHandle_t xQueue = xQueueCreate( 10, sizeof( unsigned long ) );最初ループ処理の内側に入れてたので、メモリが枯渇してMalloc errorが出ました。領域確保は当然一回だけ必要です。
② 送信側
14行目のxQueueSend()でqueueにデータを送り込みます。
xStatus = xQueueSend(xQueue, &SendValue, 0);
③ 受信側
47行目のxStatus = xQueueReceive()でqueueからデータを取り出します。
xStatus = xQueueReceive(xQueue, &ReceivedValue, xTicksToWait);
QueueHandle_t xQueue = xQueueCreate( 10, sizeof( unsigned long ) );
void threadA( void *pvParameters )
{
int32_t SendValue = 0;
BaseType_t xStatus;
SERIAL.println("Thread A: Started");
while(1){
//for(int x=0; x<100; ++x)
//{
//SERIAL.print("A");
//SERIAL.flush();
web_server();
++SendValue;
xStatus = xQueueSend(xQueue, &SendValue, 0);
if(xStatus != pdPASS) // send error check
{
while(1)
{
Serial.println("rtos queue send error, stopped");
delay(1000);
}
}
myDelayMs(2000);
//}
// delete ourselves.
// Have to call this or the system crashes when you reach the end bracket and then get scheduled.
//vTaskDelete( Handle_bTask );
}
SERIAL.println("Thread A: Deleting");
vTaskDelete( NULL );
}
//*****************************************************************
// Create a thread that prints out B to the screen every second
// this task will run forever
//*****************************************************************
void threadB( void *pvParameters )
{
BaseType_t xStatus;
int32_t ReceivedValue = 0;
const TickType_t xTicksToWait = 500U;
SERIAL.println("Thread B: Started");
while(1){
distance=s_sensor();
xStatus = xQueueReceive(xQueue, &ReceivedValue, xTicksToWait);
//Serial.println("check if data is received");
if(xStatus == pdPASS) // receive error check
{
Serial.print("received data : ");
Serial.println(ReceivedValue);
}
else{
Serial.println("No data available");
}
/*
{
if(uxQueueMessagesWaiting(xQueue) != 0)
{
while(1)
{
Serial.println("rtos queue receive error, stopped");
delay(1000);
}
}
}
*/
//SERIAL.println("B");
SERIAL.flush();
myDelayMs(500);
}
}
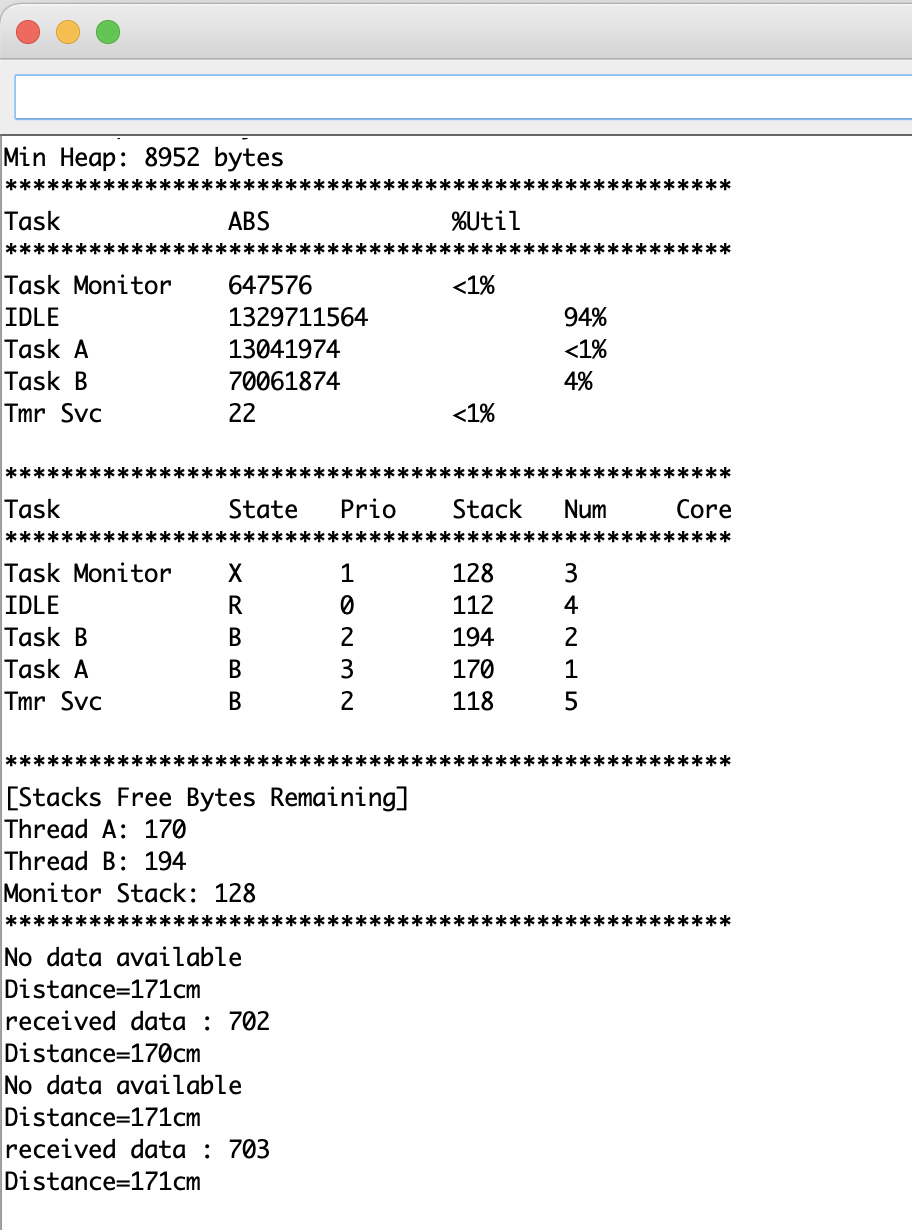
動作させると以下のシリアルポート出力になります。queueに存在しなければ存在しないよと出力してます。既にthreadAとthreadBでwebサーバーと距離センサー機能の呼び出しをおこなっているので、実用的なマルチタスクに一歩前進。
モニタータスクはリソースの解放忘れなどのチェック用に開発期間中は削除できないでしょう。
admin
FreeRTOSの基本構造の理解のために、サンプルを素材にして色々いじってみることにします。
以下は
FreeRTOS_SAMD21のライブラリ中に含まれるサンプルプログラム(Basic_RTOS_Example)のソースコード全てです。
① タスクの定義
27~29行目でグローバル変数でタスク定義をしています。
② タスクの記述
③ タスクの作成と起動
200~202行目のvoid setup()関数中で作成して205行目で起動しています。
④ タスクの終了
自分自身を終了させるときは、nullを引数に指定してvTaskDelete()を呼び出し。(71行目)
//**************************************************************************
// FreeRtos on Samd21
// By Scott Briscoe
//
// Project is a simple example of how to get FreeRtos running on a SamD21 processor
// Project can be used as a template to build your projects off of as well
//
//**************************************************************************
#include
//**************************************************************************
// Type Defines and Constants
//**************************************************************************
#define ERROR_LED_PIN 13 //Led Pin: Typical Arduino Board
//#define ERROR_LED_PIN 2 //Led Pin: samd21 xplained board
#define ERROR_LED_LIGHTUP_STATE HIGH // the state that makes the led light up on your board, either low or high
// Select the serial port the project should use and communicate over
// Some boards use SerialUSB, some use Serial
#define SERIAL SerialUSB //Sparkfun Samd21 Boards
//#define SERIAL Serial //Adafruit, other Samd21 Boards
//**************************************************************************
// global variables
//**************************************************************************
TaskHandle_t Handle_aTask;
TaskHandle_t Handle_bTask;
TaskHandle_t Handle_monitorTask;
//**************************************************************************
// Can use these function for RTOS delays
// Takes into account processor speed
// Use these instead of delay(...) in rtos tasks
//**************************************************************************
void myDelayUs(int us)
{
vTaskDelay( us / portTICK_PERIOD_US );
}
void myDelayMs(int ms)
{
vTaskDelay( (ms * 1000) / portTICK_PERIOD_US );
}
void myDelayMsUntil(TickType_t *previousWakeTime, int ms)
{
vTaskDelayUntil( previousWakeTime, (ms * 1000) / portTICK_PERIOD_US );
}
//*****************************************************************
// Create a thread that prints out A to the screen every two seconds
// this task will delete its self after printing out afew messages
//*****************************************************************
static void threadA( void *pvParameters )
{
SERIAL.println("Thread A: Started");
for(int x=0; x<100; ++x)
{
SERIAL.print("A");
SERIAL.flush();
myDelayMs(500);
}
// delete ourselves.
// Have to call this or the system crashes when you reach the end bracket and then get scheduled.
SERIAL.println("Thread A: Deleting");
vTaskDelete( NULL );
}
//*****************************************************************
// Create a thread that prints out B to the screen every second
// this task will run forever
//*****************************************************************
static void threadB( void *pvParameters )
{
SERIAL.println("Thread B: Started");
while(1)
{
SERIAL.println("B");
SERIAL.flush();
myDelayMs(2000);
}
}
//*****************************************************************
// Task will periodically print out useful information about the tasks running
// Is a useful tool to help figure out stack sizes being used
// Run time stats are generated from all task timing collected since startup
// No easy way yet to clear the run time stats yet
//*****************************************************************
static char ptrTaskList[400]; //temporary string buffer for task stats
void taskMonitor(void *pvParameters)
{
int x;
int measurement;
SERIAL.println("Task Monitor: Started");
// run this task afew times before exiting forever
while(1)
{
myDelayMs(10000); // print every 10 seconds
SERIAL.flush();
SERIAL.println("");
SERIAL.println("****************************************************");
SERIAL.print("Free Heap: ");
SERIAL.print(xPortGetFreeHeapSize());
SERIAL.println(" bytes");
SERIAL.print("Min Heap: ");
SERIAL.print(xPortGetMinimumEverFreeHeapSize());
SERIAL.println(" bytes");
SERIAL.flush();
SERIAL.println("****************************************************");
SERIAL.println("Task ABS %Util");
SERIAL.println("****************************************************");
vTaskGetRunTimeStats(ptrTaskList); //save stats to char array
SERIAL.println(ptrTaskList); //prints out already formatted stats
SERIAL.flush();
SERIAL.println("****************************************************");
SERIAL.println("Task State Prio Stack Num Core" );
SERIAL.println("****************************************************");
vTaskList(ptrTaskList); //save stats to char array
SERIAL.println(ptrTaskList); //prints out already formatted stats
SERIAL.flush();
SERIAL.println("****************************************************");
SERIAL.println("[Stacks Free Bytes Remaining] ");
measurement = uxTaskGetStackHighWaterMark( Handle_aTask );
SERIAL.print("Thread A: ");
SERIAL.println(measurement);
measurement = uxTaskGetStackHighWaterMark( Handle_bTask );
SERIAL.print("Thread B: ");
SERIAL.println(measurement);
measurement = uxTaskGetStackHighWaterMark( Handle_monitorTask );
SERIAL.print("Monitor Stack: ");
SERIAL.println(measurement);
SERIAL.println("****************************************************");
SERIAL.flush();
}
// delete ourselves.
// Have to call this or the system crashes when you reach the end bracket and then get scheduled.
SERIAL.println("Task Monitor: Deleting");
vTaskDelete( NULL );
}
//*****************************************************************
void setup()
{
SERIAL.begin(115200);
delay(1000); // prevents usb driver crash on startup, do not omit this
while (!SERIAL) ; // Wait for serial terminal to open port before starting program
SERIAL.println("");
SERIAL.println("******************************");
SERIAL.println(" Program start ");
SERIAL.println("******************************");
SERIAL.flush();
// Set the led the rtos will blink when we have a fatal rtos error
// RTOS also Needs to know if high/low is the state that turns on the led.
// Error Blink Codes:
// 3 blinks - Fatal Rtos Error, something bad happened. Think really hard about what you just changed.
// 2 blinks - Malloc Failed, Happens when you couldn't create a rtos object.
// Probably ran out of heap.
// 1 blink - Stack overflow, Task needs more bytes defined for its stack!
// Use the taskMonitor thread to help gauge how much more you need
vSetErrorLed(ERROR_LED_PIN, ERROR_LED_LIGHTUP_STATE);
// sets the serial port to print errors to when the rtos crashes
// if this is not set, serial information is not printed by default
vSetErrorSerial(&SERIAL);
// Create the threads that will be managed by the rtos
// Sets the stack size and priority of each task
// Also initializes a handler pointer to each task, which are important to communicate with and retrieve info from tasks
xTaskCreate(threadA, "Task A", 256, NULL, tskIDLE_PRIORITY + 3, &Handle_aTask);
xTaskCreate(threadB, "Task B", 256, NULL, tskIDLE_PRIORITY + 2, &Handle_bTask);
xTaskCreate(taskMonitor, "Task Monitor", 256, NULL, tskIDLE_PRIORITY + 1, &Handle_monitorTask);
// Start the RTOS, this function will never return and will schedule the tasks.
vTaskStartScheduler();
// error scheduler failed to start
// should never get here
while(1)
{
SERIAL.println("Scheduler Failed! \n");
SERIAL.flush();
delay(1000);
}
}
//*****************************************************************
// This is now the rtos idle loop
// No rtos blocking functions allowed!
//*****************************************************************
void loop()
{
// Optional commands, can comment/uncomment below
SERIAL.print("."); //print out dots in terminal, we only do this when the RTOS is in the idle state
SERIAL.flush();
delay(100); //delay is interrupt friendly, unlike vNopDelayMS
}
//*****************************************************************
動作させてみた写真は以下の通りです。既にthreadAは終了してしまってます。スタック領域が枯渇しているので、リソース解放抜けがありそうです。
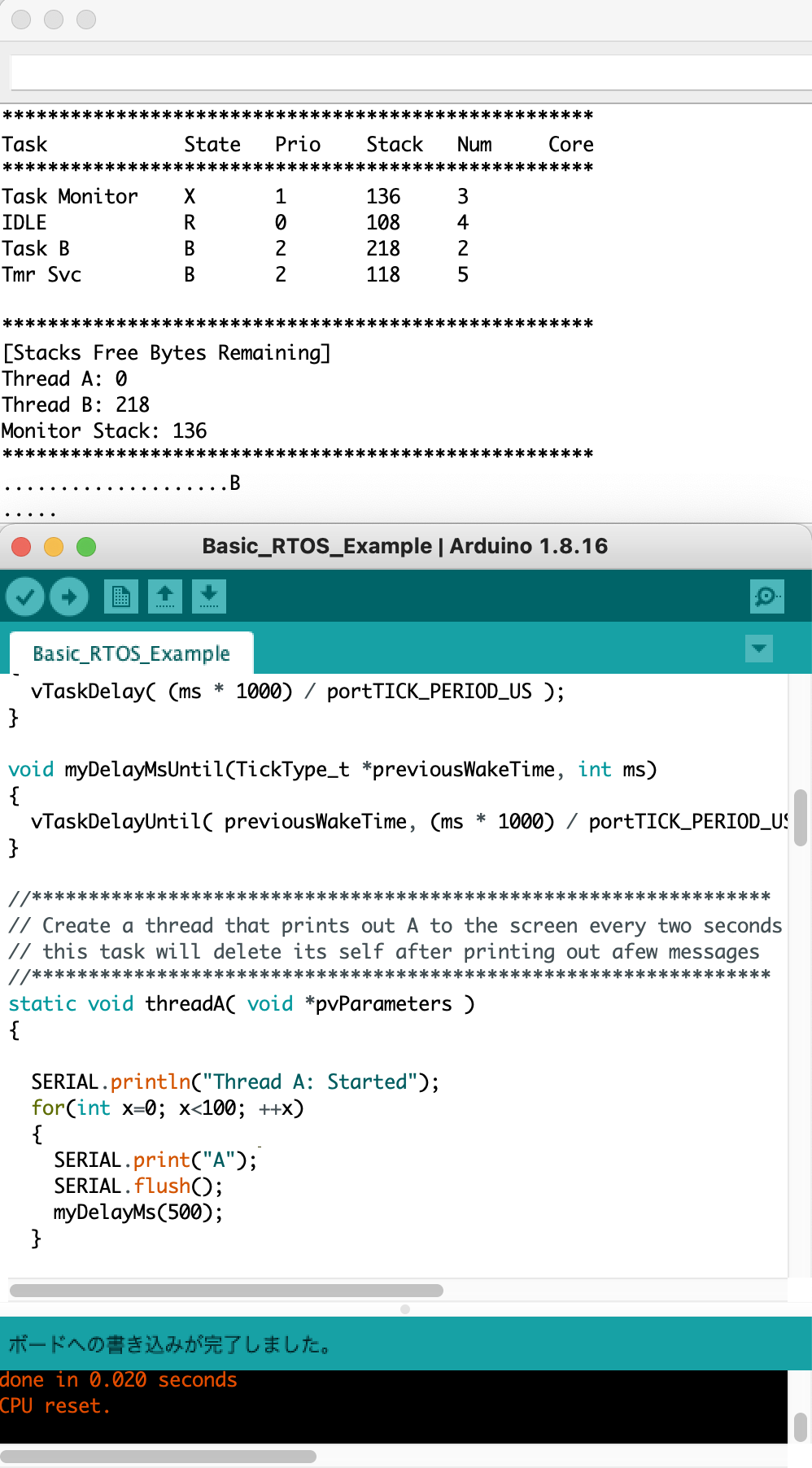
まだいくつか必須の機能はありますが追々と確認していきます。
FreeRTOSのAPIドキュメントはこちらから。
https://www.freertos.org/a00106.html
admin
やはりシングルタスクではアプリ作りづらい(作れない)ので、リアルタイムOSを導入してみようと思う。
使うのはタスクスケジューラーとメッセージ機能ぐらいだろうけど、これが使えれば十分。
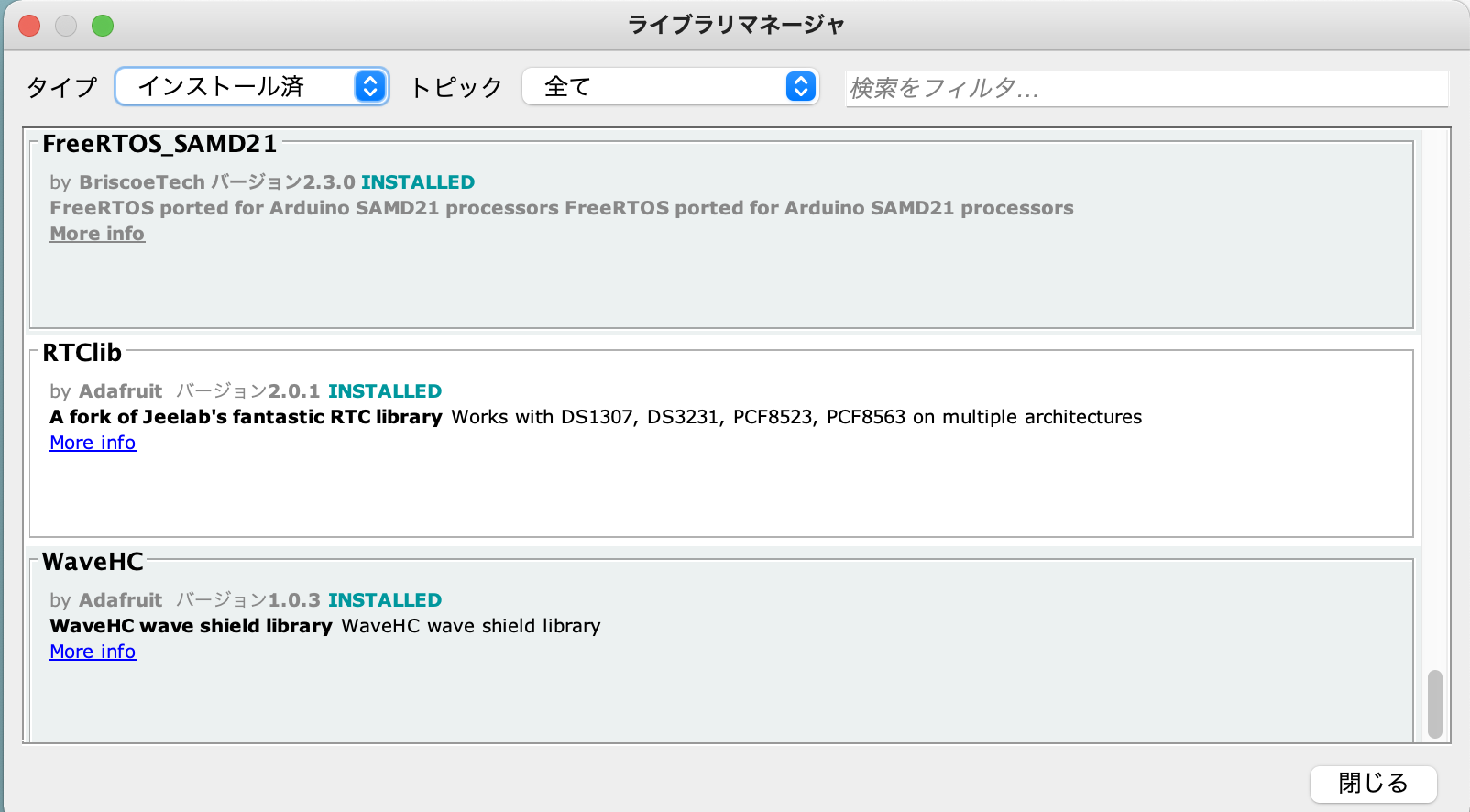
プロセッサ系でArduino MKR WiFi 1010もサポート対象のようだから、ライブラリだけインストールしてみた。まずは簡単な機能で動作確認してみることから始めます。
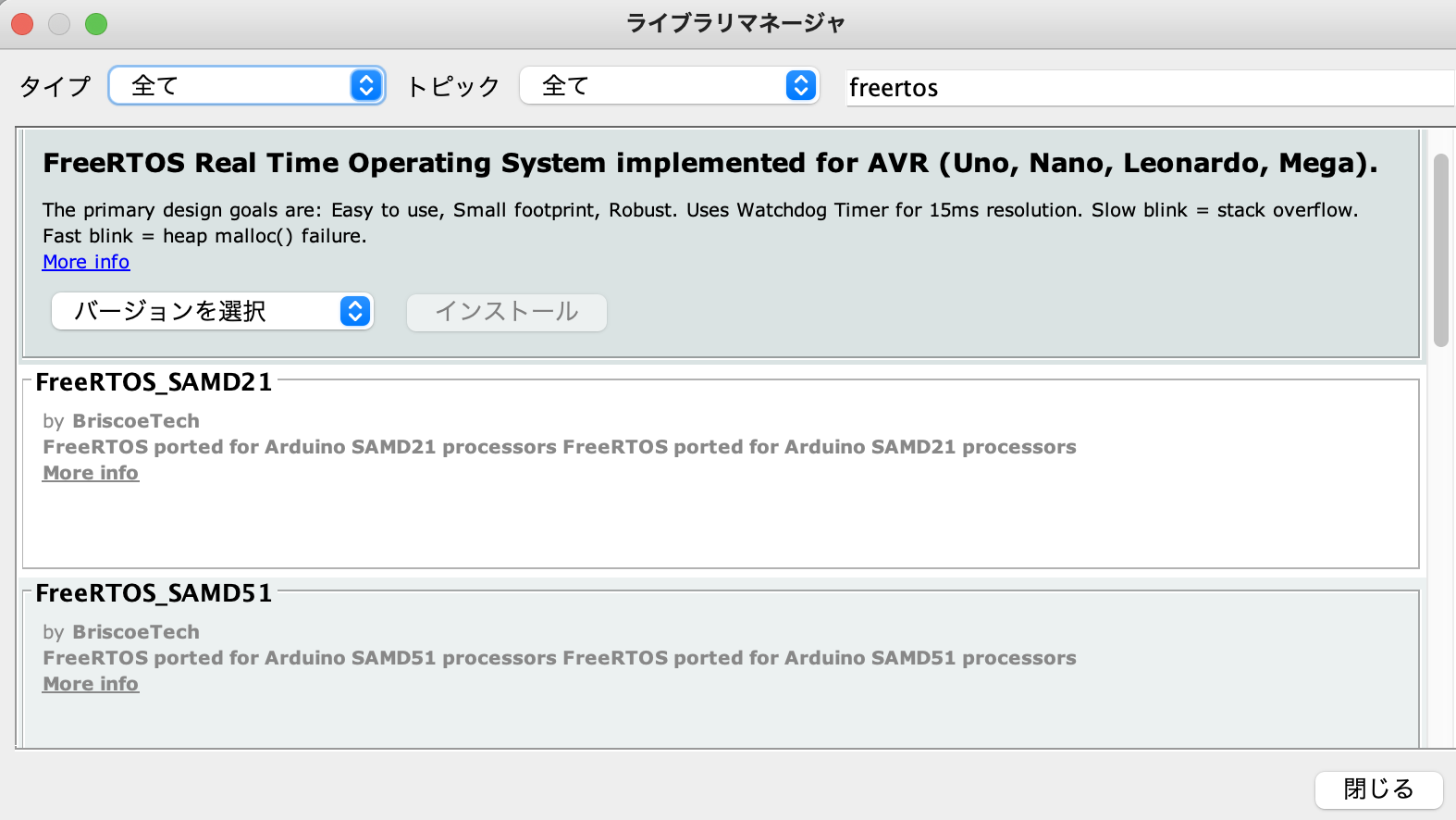
<追記>
サンプル動かそうとするとavr/io.h見つからないとコンパイルエラー、何故かなと思ったらArduino MKR WiFi 1010はCPUがSAMD21系だからライブラリが違う。適切なライブラリをインストールして、不要なライブラリはディレクトリから削除してIDEを再立ち上げすると大丈夫そうです。
admin
今まで安定化電源で高め(およそ9V)の電圧でデバッグしてますが、DCモーターはPWMで電圧制御できるからまだしも、ステッピングモーターは5V定格だから、Arduinoシステムの電源電圧の決定しないといけない。
① Arduino本体:Vinは6~12V
② DCモーター : 6V
③ ステッピングモーター:5V
④ 超音波距離センサー:3.3V(Arduino本体から供給)
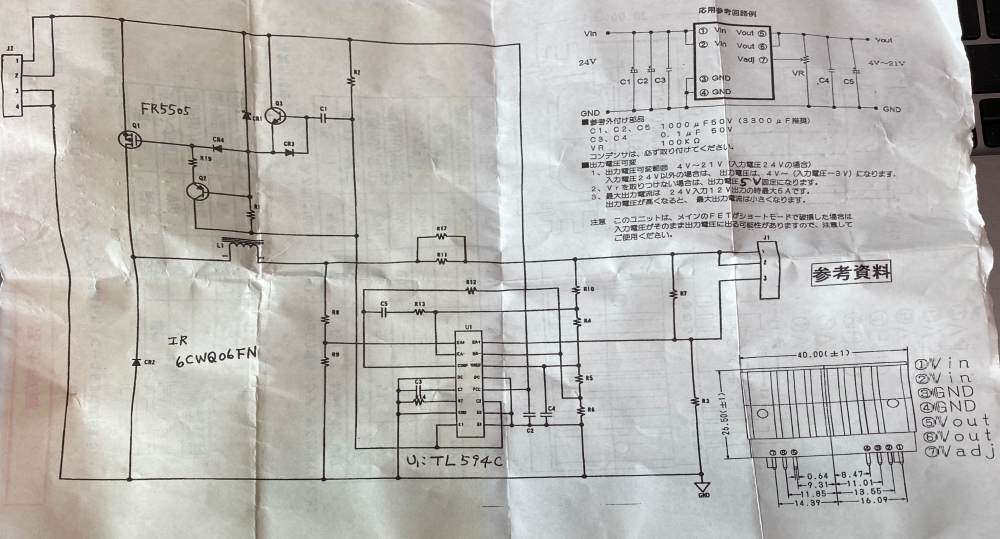
ということで概ね6Vということで良いだろう。単三4本でアルカリもしくはNiH電池直列で作ろうと思ってますが、デバッグ用の安定化電源はmin 9Vしか出ないから、DC-DCで6V以下に落として、かつ可変電圧にしてデバッグするためにDC-DCコンバーター製作。おそらく今後も必要になるだろうからちゃんと作る。
推奨回路図
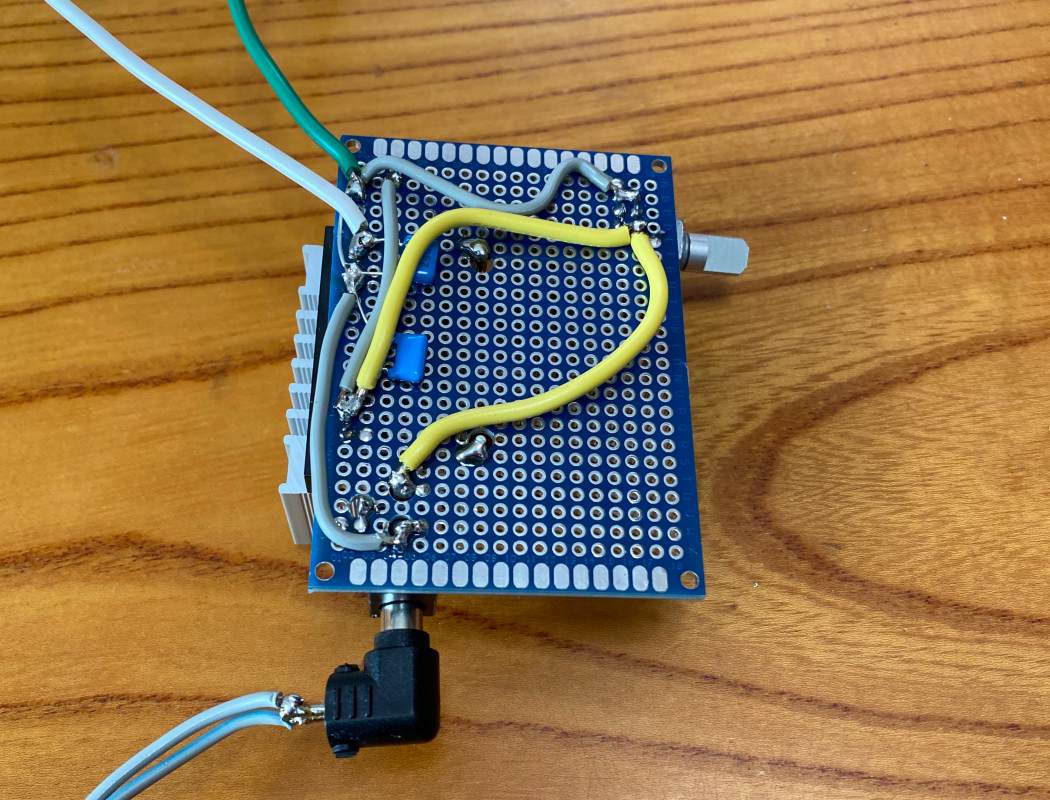
裏側(センス線だけが未配線、かつこのままだと可変範囲が反対になるから可変抵抗のGND側と電源側を入れ替えてます)
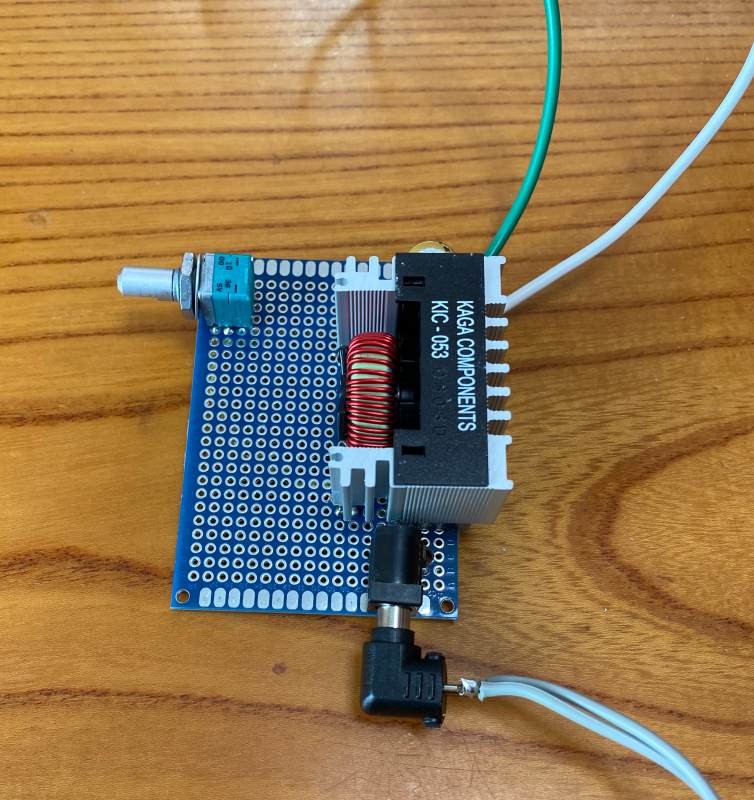
表側(大容量の電解Cap手持ちで470μF一個しかなかったから、出力側にだけ取り付け、発振防止用の0.1μFは両方に)
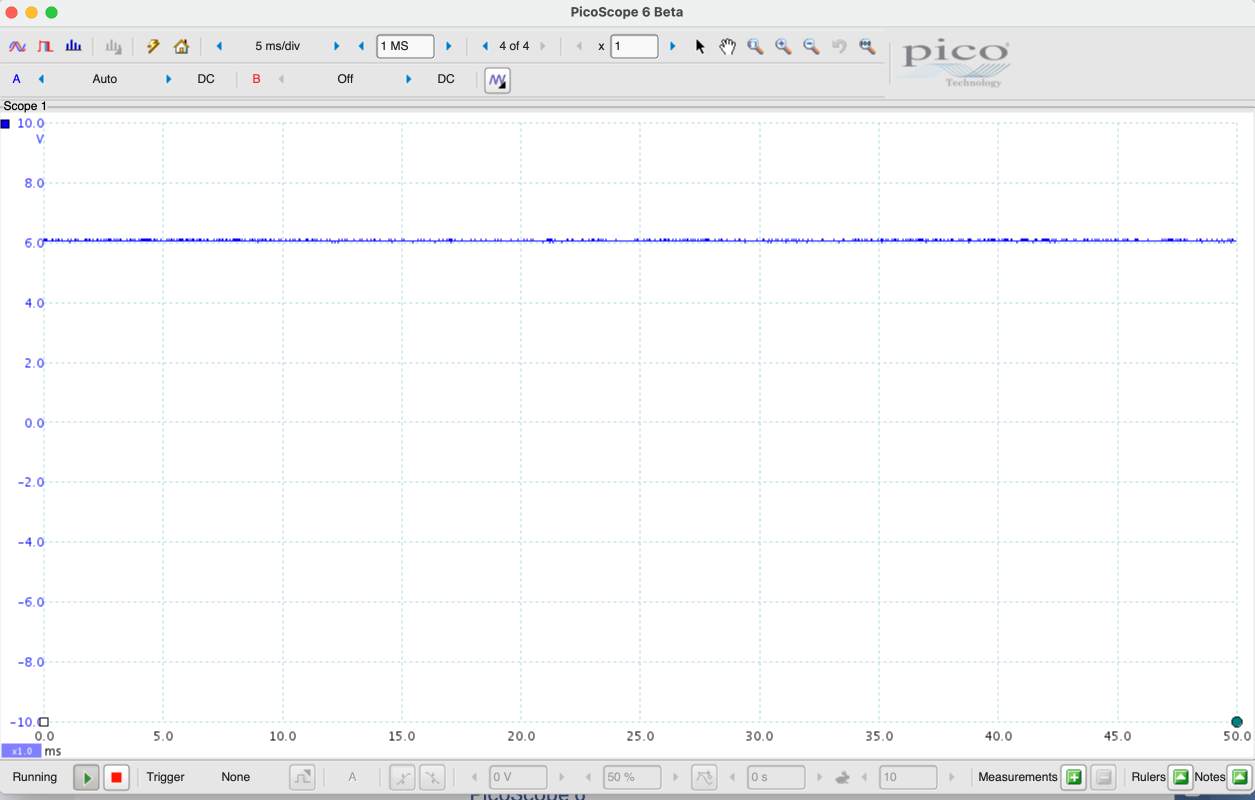
出力品質確認(無負荷です、本来は負荷変動時も確認必要)
以上で考えたけど、Arduino自体がVinで4.8Vぐらいまで低下するとまともに動かなくなるようだから、変則的だけけれども結局単三のNiHの5直ということになりそう。
admin
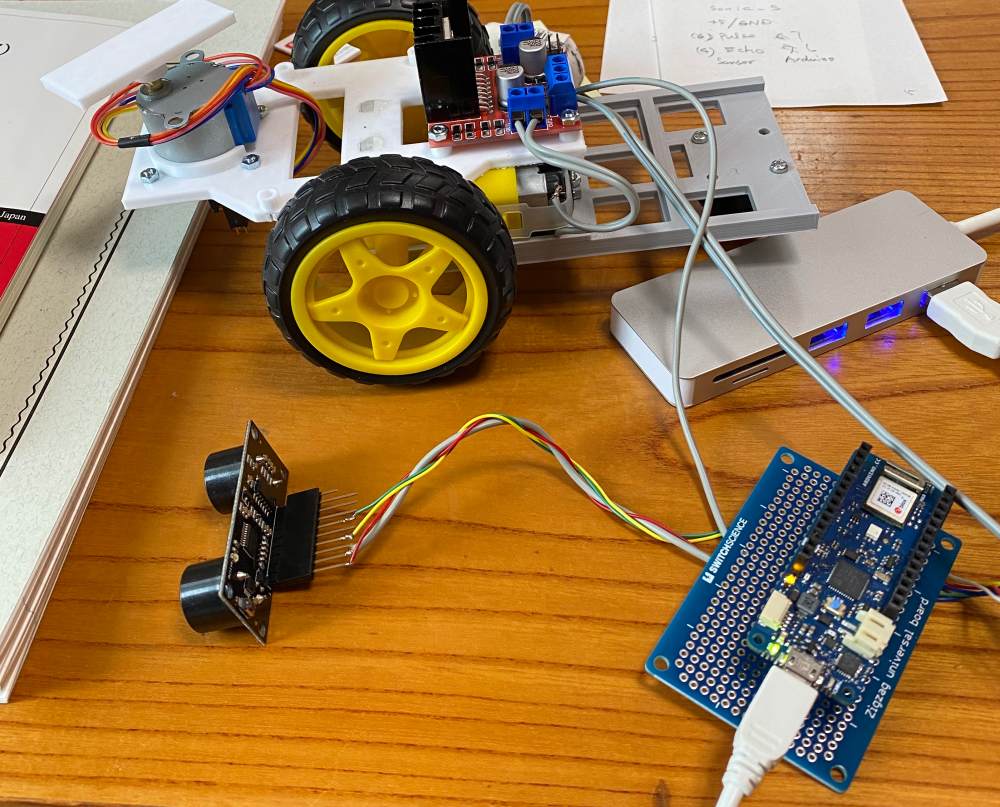
URM37の今売られてるのはV4.0、V3系から制御ICも変わっていて使い方も多少異なるようです。
URM37には機能は超音波センサー以外もあるらしいが今使うのは距離センサーでレーダー的に。V4のサンプルプログラムは見つからないのでV5参照、おそらく部品配置同じだから使い方も同じだろうから。
URM37の動作電圧は3.3~5.5VでArduino自身は内部3.3V動作だから、電源はArduinoの3.3V出力から供給して、制御ピンは
// # Pin 3 (Arduino) -> Pin 7 ECHO (URM V5.0)
// # Pin 5 (Arduino) -> Pin 6 COMP/TRIG (URM V5.0)
のように、トリガーはDIOの7、戻りのパルスはDIOの6で受けています。
工場出荷時のデフォルトはTTLになっているのでジャンパー設定は不要、というかジャンパー設定が存在しない。使い方含めて以下のメーカーサイトに記載あります。
https://wiki.dfrobot.com/URM37_V5.0_Ultrasonic_Sensor_SKU_SEN0001_
The factory default settings
一番手間の掛からなそうな、デフォルトのPWM trigger modeで使います。動作確認コードはDIOだけは変更設定して他はほぼそのまま使っています。
// # Editor : roker
// # Date : 05.03.2018
// # Product name: URM V5.0 ultrasonic sensor
// # Product SKU : SEN0001
// # Version : 1.0
// # Description:
// # The Sketch for scanning 180 degree area 2-800cm detecting range
// # The sketch for using the URM37 PWM trigger pin mode from DFRobot
// # and writes the values to the serialport
// # Connection:
// # Vcc (Arduino) -> Pin 1 VCC (URM V5.0)
// # GND (Arduino) -> Pin 2 GND (URM V5.0)
// # Pin 6 (Arduino) -> Pin 4 ECHO (URM V5.0)
// # Pin 7 (Arduino) -> Pin 6 COMP/TRIG (URM V5.0)
// # Working Mode: PWM trigger pin mode.
int URECHO = 6; // PWM Output 0-50000US,Every 50US represent 1cm
int URTRIG = 7; // trigger pin
unsigned int DistanceMeasured = 0;
void setup()
{
//Serial initialization
Serial.begin(9600); // Sets the baud rate to 9600
pinMode(URTRIG, OUTPUT); // A low pull on pin COMP/TRIG
digitalWrite(URTRIG, HIGH); // Set to HIGH
pinMode(URECHO, INPUT); // Sending Enable PWM mode command
delay(500);
Serial.println(“Init the sensor”);
}
void loop()
{
Serial.print(“Distance=”);
digitalWrite(URTRIG, LOW);
digitalWrite(URTRIG, HIGH);
unsigned long LowLevelTime = pulseIn(URECHO, LOW) ;
if (LowLevelTime >= 50000) // the reading is invalid.
{
Serial.println(“Invalid”);
}
else
{
DistanceMeasured = LowLevelTime / 50; // every 50us low level stands for 1cm
Serial.print(DistanceMeasured);
Serial.println(“cm”);
}
delay(100);
}
距離センサーの精度としては、対象物が多少傾いていてもセンターから多少外れてもきちんと距離を出してくれるので使えるセンサーです。
admin
部品も揃ったので、機能ごとの動作確認を行なっていきます。
まずはDCモーターからですが、両輪の回転差を発生させないと直進しかできないので、ただしモーターの特性は不揃いなので曲がりますが、PWMを使って実質DCモーターへの供給電圧をコントロールすることで、直進性あるいは回転を実現します。
との情報から、D0とD5をPWM制御、D1~D4を回転方向制御に使います。
Arduinoのコードは以下の通り。元のソースではPWMのduty(0~255指定)を可変していますが、電源電圧9.2Vぐらい(デバッグ時は外部の低電圧電源使用)だとdutyが30%以下あたりでモーターは回らなくなるので固定値を使って確認しています。
pinModeのピン番号指定は0から始まります。
————————————————–
// デジタルピンの定義
// pin number start from 0(D0)
const int IN1 = 1;
const int IN2 = 2;
const int IN3 = 3;
const int IN4 = 4;
const int ENA = 0; // PWM制御で使うENAピンをD9に(モーター1のPWM制御ピン)
const int ENB = 5; // PWM制御で使うENBピンをD10に(モーター2のPWM制御ピン)
int i = 0;
int step = 5;
void setup(){
pinMode(IN1, OUTPUT); // デジタルピンを出力に設定
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
}
void loop(){
digitalWrite(IN1, HIGH); // HIGH LOWの組み合わせでモーター回転
digitalWrite(IN2, LOW); // 2つのモーターを正回転
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
for(i=0; i<=255; i=i+step){ // PWM制御のデューティー比を指定してモーター回転速度を変える
analogWrite(ENA, 160);
analogWrite(ENB, 160);
delay(50);
}
delay(1000);
digitalWrite(IN1, LOW); // HIGH LOWの組み合わせでモーター回転
digitalWrite(IN2, HIGH); // 2つのモーターを逆回転(上記とは反対に回転)
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
for(i=0; i<=255; i=i+step){ // PWM制御のデューティー比を指定してモーター回転速度を変える
analogWrite(ENA, 80);
analogWrite(ENB, 220);
delay(50);
}
delay(1000);
}
————————————————–
参考情報及びソースは以下のサイトから。
https://burariweb.info/electronic-work/arduino-learning/arduino-motor-driver-l298n.html#L298N-2`
動作の状況は以下の動画から、分かりづらいですが(途中でモーターの回転音が一瞬途切れた時)順方向から逆方向に回転しています。
admin
何らかの状態保存しておきたい時に使える不揮発記憶としての使い方。
http://7ujm.net/micro/arduino_eeprom.html
何に使いたいかというと、手元にあったステッピングモーターをサーボモーターの代替えに使いますが、移動量しか知ることができないので次の電源オン時に絶対位置がわからなくなるから電源オフ時に位置情報を保存したかったから。
ステッピングモーター使えばそんなことは考慮不要なのですが。
と思ったらArduino MKR WiFi 1010にはEEPROMないんだ。ということは電源オフ時の処理として、ステッピングモーターの初期化処理(最初の位置に戻す)しないといけない。
admin
{kind=link}